




























17. APPLICATION OF FUNCTIONS
17 - 8
17.1.7 Cautions for the J3 compatibility mode
The J3 compatibility mode are partly changed and has restrictions compared with MR-J3 series.
(1) The alarm display was changed from 2 digits (_ _) to 3 digits (_ _. _). The alarm detail number (._) is
displayed in addition to the alarm No (_ _). The alarm No. (_ _) is not changed.
(2) When the power of the servo amplifier is cut or fiber-optic cable is disconnected, the same type
communication can be cut regardless of connection order. When you power on/off the servo amplifier
during operation, use the connect/disconnect function of the controller. Refer to the following manuals
for detail.
MELSEC iQ-R Motion Controller Programming Manual (Common) (R16MTCPU/R32MTCPU) (IB-
0300237) "5.3.1 Connect/disconnect function of SSCNET communication"
Motion controller Q series Programming Manual (COMMON) (Q173D(S)CPU/Q172D(S)CPU) (IB-
0300134) "4.11.1 Connect/disconnect function of SSCNET communication"
MELSEC iQ-R Simple Motion Module User's Manual (Application)
(RD77MS2/RD77MS4/RD77MS8/RD77MS16) (IB-0300247) "8.12 Connect/Disconnect Function of
SSCNET Communication"
MELSEC-Q QD77MS Simple Motion Module User's Manual (IB-0300185) "14.12 Connect/disconnect
function of SSCNET communication"
MELSEC-L LD77MH Simple Motion Module User's Manual (IB-0300172) "14.13 Connect/disconnect
function of SSCNET communication"
MELSEC-L LD77MS Simple Motion Module User's Manual (Positioning Control) (IB-0300211) "14.13
Connect/disconnect function of SSCNET communication"
(3) The J3 compatibility mode has a functional compatibility. However, the operation timing may differ.
Check the operation timing on customer side to use.
(4) The J3 compatibility mode is not compatible with high-response control set by [Pr. PA01 Operation
mode].
(5) For MR-J3 series, a linear encoder was connected to the CN2L connector. For J4 (J3 compatibility
mode), it is connected to the CN2 connector. Therefore, set the two-wire/four-wire type of the linear
encoder in the J3 compatibility mode with [Pr. PC26], not with [Pr. PC04].
(6) When you use a linear servo motor, select linear servo motor with [Pr. PA17] and [Pr. PA18].
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
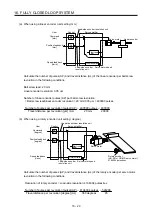
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
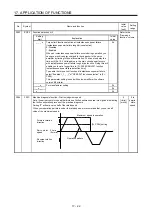
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































