























6
14.4.3 Dynamic brake characteristics .............................................................................................. 14-32
14.4.4 Permissible load to motor mass ratio when the dynamic brake is used ............................... 14-33
15. USING A DIRECT DRIVE MOTOR
15- 1 to 15-22
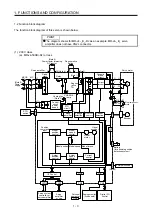
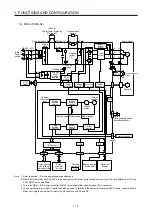
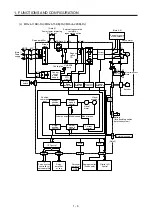
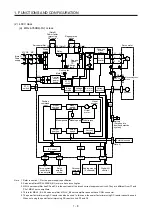
15.1 Functions and configuration ......................................................................................................... 15- 1
15.1.1 Summary ................................................................................................................................ 15- 1
15.1.2 Servo system with auxiliary equipment .................................................................................. 15- 2
15.2 Signals and wiring ......................................................................................................................... 15- 3
15.3 Operation and functions ................................................................................................................ 15- 4
15.3.1 Startup procedure .................................................................................................................. 15- 5
15.3.2 Magnetic pole detection ......................................................................................................... 15- 6
15.3.3 Operation from controller ...................................................................................................... 15-14
15.3.4 Function................................................................................................................................. 15-15
15.4 Characteristics ............................................................................................................................. 15-17
15.4.1 Overload protection characteristics ...................................................................................... 15-17
15.4.2 Power supply capacity and generated loss .......................................................................... 15-19
15.4.3 Dynamic brake characteristics .............................................................................................. 15-20
16. FULLY CLOSED LOOP SYSTEM
16- 1 to 16-26
16.1 Functions and configuration ......................................................................................................... 16- 1
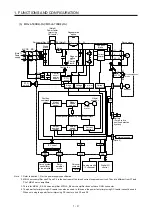
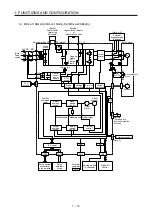
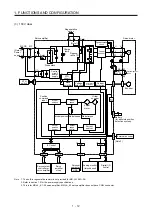
16.1.1 Function block diagram .......................................................................................................... 16- 1
16.1.2 Selecting procedure of control mode ..................................................................................... 16- 3
16.1.3 System configuration
.............................................................................................................. 16- 4
16.2 Load-side encoder ........................................................................................................................ 16- 6
16.2.1 Linear encoder ....................................................................................................................... 16- 6
16.2.2 Rotary encoder
....................................................................................................................... 16- 6
16.2.3 Configuration diagram of encoder cable ................................................................................ 16- 6
16.2.4 MR-J4FCCBL03M branch cable ............................................................................................ 16- 8
16.3 Operation and functions ................................................................................................................ 16- 9
16.3.1 Startup .................................................................................................................................... 16- 9
16.3.2 Home position return ............................................................................................................. 16-16
16.3.3 Operation from controller ...................................................................................................... 16-19
16.3.4 Fully closed loop control error detection functions................................................................ 16-21
16.3.5 Auto tuning function .............................................................................................................. 16-22
16.3.6 Machine analyzer function .................................................................................................... 16-22
16.3.7 Test operation mode ............................................................................................................. 16-22
16.3.8 Absolute position detection system under fully closed loop system ..................................... 16-23
16.3.9 About MR Configurator2 ....................................................................................................... 16-24
17. APPLICATION OF FUNCTIONS
17- 1 to 17-82
17.1 J3 compatibility mode ................................................................................................................... 17- 1
17.1.1 Outline of J3 compatibility mode ............................................................................................ 17- 1
17.1.2 Operation modes supported by J3 compatibility mode .......................................................... 17- 2
17.1.3 J3 compatibility mode supported function list ........................................................................ 17- 2
17.1.4 How to switch J4 mode/J3 compatibility mode ...................................................................... 17- 5
17.1.5 How to use the J3 compatibility mode ................................................................................... 17- 6
17.1.6 Cautions for switching J4 mode/J3 compatibility mode ......................................................... 17- 7
17.1.7 Cautions for the J3 compatibility mode .................................................................................. 17- 8
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































