























3. SIGNALS AND WIRING
3 - 42
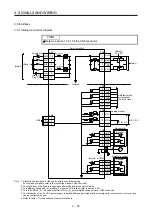
(1) Connection diagram
B2
B1
U
B
Servo motor
24 V DC
ALM
(Malfunction)
MBR
RA1
(Note 1)
Servo amplifier
MBR
DOCOM
RA1
(Note 2)
24 V DC
Note 1. Create the circuit in order to shut off by interlocking with the emergency stop switch.
2. Do not use the 24 V DC interface power supply for the electromagnetic brake.
(2) Setting
In [Pr. PC02 Electromagnetic brake sequence output], set a delay time (Tb) from MBR (Electromagnetic
brake interlock) off to base circuit shut-off at a servo-off as in the timing chart in section 3.10.2.
3.10.2 Timing chart
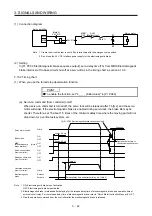
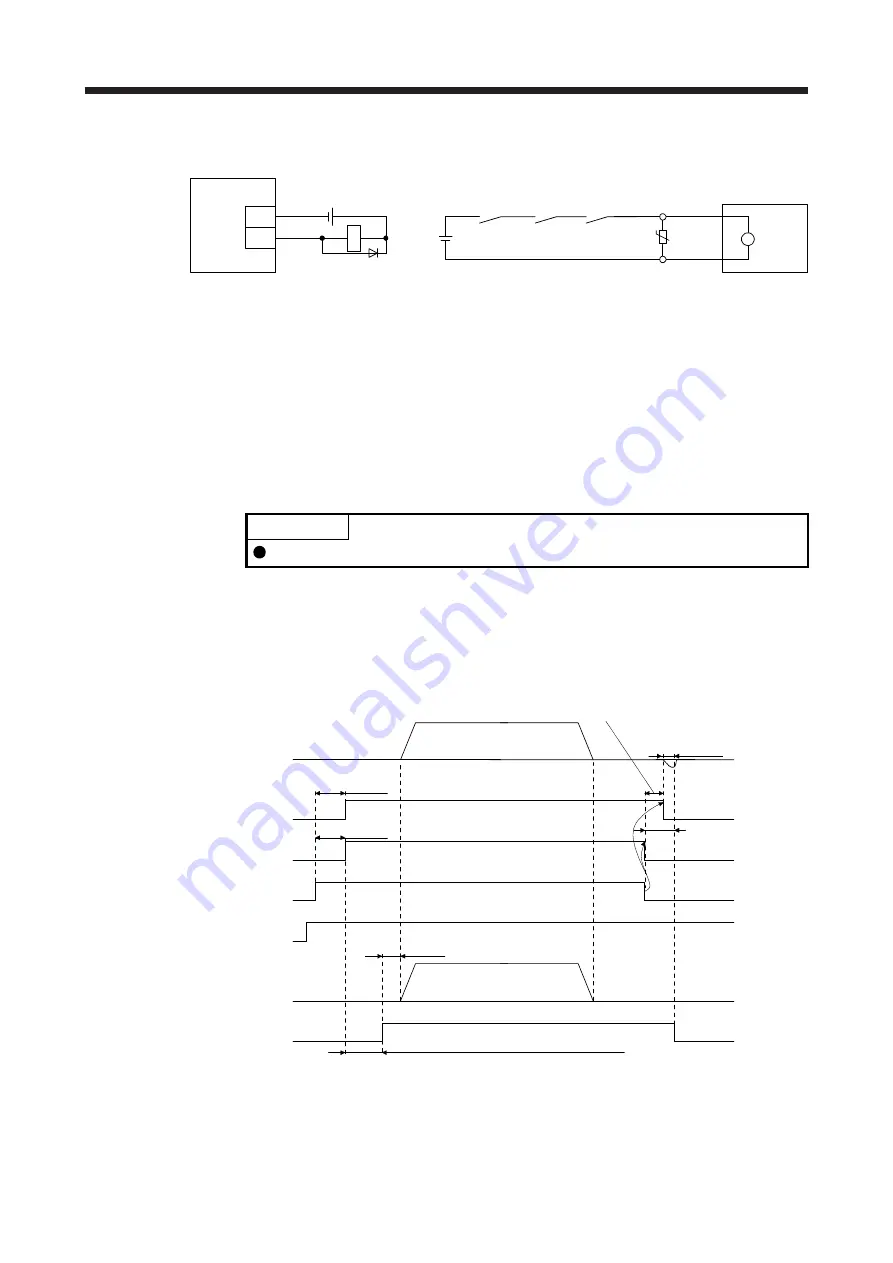
(1) When you use the forced stop deceleration function
POINT
To enable the function, set "2 _ _ _ (initial value)" in [Pr. PA04].
(a) Servo-on command (from controller) on/off
When servo-on command is turned off, the servo lock will be released after Tb [ms], and the servo
motor will coast. If the electromagnetic brake is enabled during servo-lock, the brake life may be
shorter. Therefore, set Tb about 1.5 times of the minimum delay time where the moving part will not
drop down for a vertical axis system, etc.
Approx. 95 ms
Approx. 95 ms
MBR
(Electromagnetic
brake interlock)
(Note 1)
ON
OFF
ON
OFF
0 r/min
Base circuit
Servo motor speed
Coasting
Operation delay time of
the electromagnetic brake
Ready-on command
(from controller)
ON
OFF
Release
Activate
Operation command
(from controller)
Electromagnetic
brake
Release delay time and external relay, etc. (Note 2)
(Note 3)
0 r/min
Servo-on command
(from controller)
ON
OFF
Tb [Pr. PC02 Electromagnetic brake sequence output]
Note 1. ON: Electromagnetic brake is not activated.
OFF: Electromagnetic brake is activated.
2. Electromagnetic brake is released after delaying for the release delay time of electromagnetic brake and operation time of
external circuit relay. For the release delay time of electromagnetic brake, refer to "Servo Motor Instruction Manual (Vol. 3)".
3. Give the operation command from the controller after the electromagnetic brake is released.
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































