

























17. APPLICATION OF FUNCTIONS
17 - 53
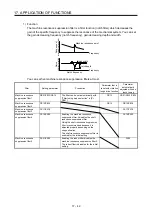
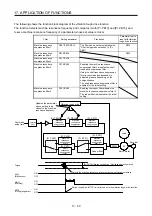
a) [Pr. PB06] to [Pr. PB10]
These parameters are the same as in ordinary manual adjustment. Gain switching allows the
values of load to motor inertia ratio/load to motor mass ratio, model loop gain, position loop
gain, speed loop gain, and speed integral compensation to be switched.
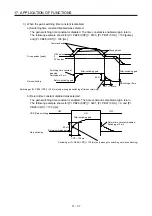
b) [Pr. PB19] to [Pr. PB22]/[Pr. PX04] to [Pr. PX07]
These parameters are the same as in ordinary manual adjustment. You can switch the
vibration frequency, resonance frequency, vibration frequency damping, and resonance
frequency damping by switching gain during motor stop.
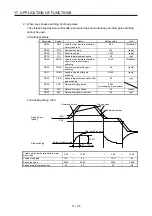
c) [Pr. PB29 Load to motor inertia ratio/load to motor mass ratio after gain switching]
Set the load to motor inertia ratio or load to motor mass ratio after gain switching. If the load to
motor inertia ratio does not change, set it to the same value as [Pr. PB06 Load to motor inertia
ratio/load to motor mass ratio].
d) [Pr. PB30 Position loop gain after gain switching], [Pr. PB31 Speed loop gain after gain
switching], and [Pr. PB32 Speed integral compensation after gain switching]
Set the values of after switching position loop gain, speed loop gain and speed integral
compensation.
e) Vibration suppression control after gain switching ([Pr. PB33] to [Pr. PB36]/[Pr. PX08] to [Pr.
PX11]) , and [Pr. PX12 Model loop gain after gain switching]
The gain switching vibration suppression control and gain switching model loop gain are used
only with control command from the controller.
You can switch the vibration frequency, resonance frequency, vibration frequency damping,
resonance frequency damping, and model loop gain of the vibration suppression control 1 and
vibration suppression control 2.
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































