




























5. PARAMETERS
5 - 23
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
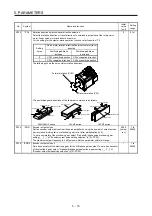
PB06
GD2
Load to motor inertia ratio/load to motor mass ratio
This is used to set the load to motor inertia ratio or load to motor mass ratio. Setting a value
considerably different from the actual load moment of inertia or load mass may cause an
unexpected operation such as an overshoot.
The setting of the parameter will be the automatic setting or manual setting depending on the
[Pr. PA08] setting. Refer to the following table for details. When the parameter is automatic
setting, the value will vary between 0.00 and 100.00.
7.00
Multiplier
0.00 to
300.00
Pr. PA08
This parameter
_ _ _ 0 (2 gain adjustment mode 1 (interpolation mode))
Automatic setting
_ _ _ 1 (Auto tuning mode 1)
_ _ _ 2 (Auto tuning mode 2)
Manual setting
_ _ _ 3 (Manual mode)
_ _ _ 4 (2 gain adjustment mode 2)
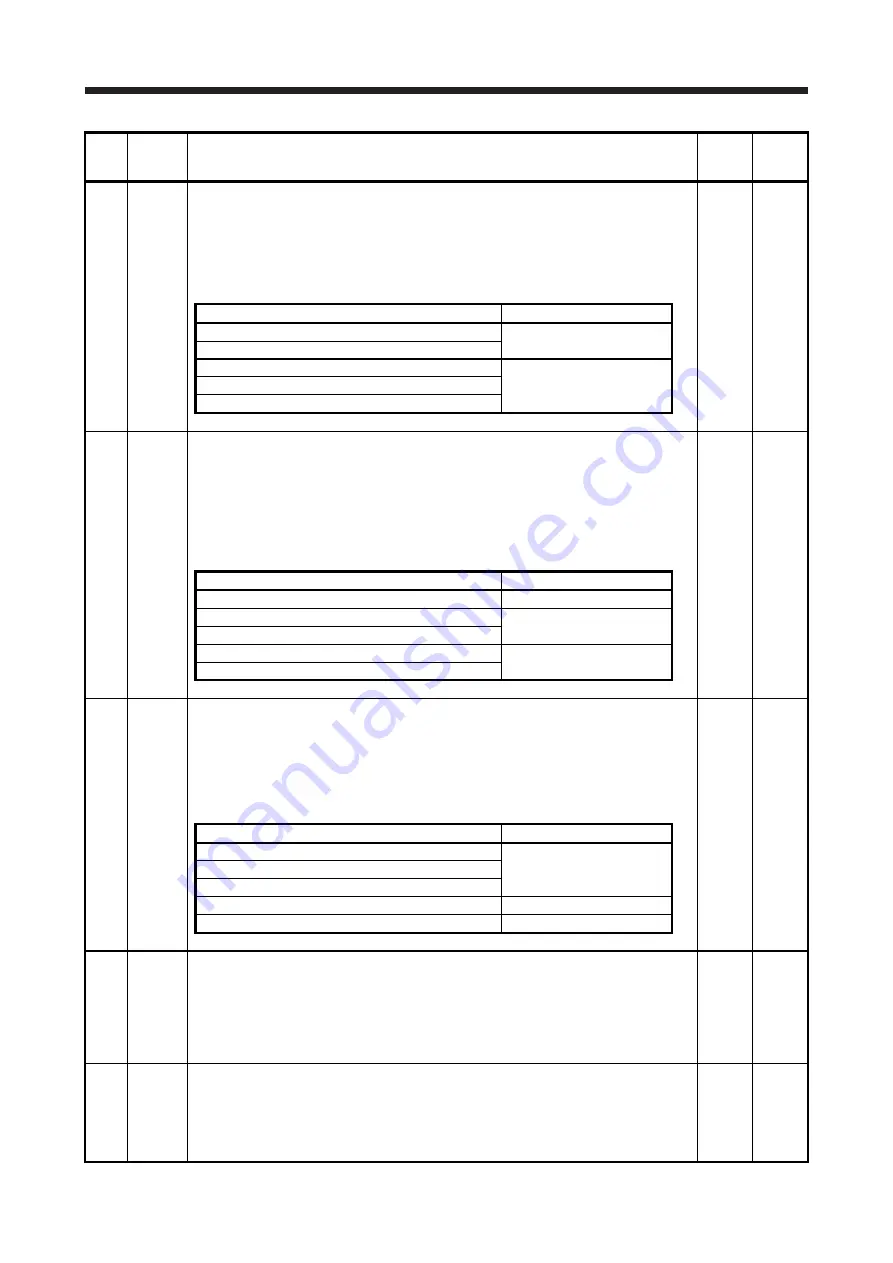
PB07
PG1
Model loop gain
Set the response gain up to the target position.
Increasing the setting value will also increase the response level to the position command but
will be liable to generate vibration and noise.
For the vibration suppression control tuning mode, the setting range of [Pr. PB07] is limited.
Refer to section 7.1.5 (4) for details.
The setting of the parameter will be the automatic setting or manual setting depending on the
[Pr. PA08] setting. Refer to the following table for details.
15.0
[rad/s]
1.0 to
2000.0
Pr. PA08
This parameter
_ _ _ 0 (2 gain adjustment mode 1 (interpolation mode))
Manual setting
_ _ _ 1 (Auto tuning mode 1)
Automatic setting
_ _ _ 2 (Auto tuning mode 2)
_ _ _ 3 (Manual mode)
Manual setting
_ _ _ 4 (2 gain adjustment mode 2)
PB08
PG2
Position loop gain
This is used to set the gain of the position loop.
Set this parameter to increase the position response to level load disturbance.
Increasing the setting value will also increase the response level to the load disturbance but
will be liable to generate vibration and noise.
The setting of the parameter will be the automatic setting or manual setting depending on the
[Pr. PA08] setting. Refer to the following table for details.
37.0
[rad/s]
1.0 to
2000.0
Pr. PA08
This parameter
_ _ _ 0 (2 gain adjustment mode 1 (interpolation mode))
Automatic setting
_ _ _ 1 (Auto tuning mode 1)
_ _ _ 2 (Auto tuning mode 2)
_ _ _ 3 (Manual mode)
Manual setting
_ _ _ 4 (2 gain adjustment mode 2)
Automatic setting
PB09
VG2
Speed loop gain
This is used to set the gain of the speed loop.
Set this parameter when vibration occurs on machines of low rigidity or large backlash.
Increasing the setting value will also increase the response level but will be liable to generate
vibration and noise.
The setting of the parameter will be the automatic setting or manual setting depending on the
[Pr. PA08] setting. Refer to the table of [Pr. PB08] for details.
823
[rad/s]
20 to
65535
PB10
VIC
Speed integral compensation
This is used to set the integral time constant of the speed loop.
Decreasing the setting value will increase the response level but will be liable to generate
vibration and noise.
The setting of the parameter will be the automatic setting or manual setting depending on the
[Pr. PA08] setting. Refer to the table of [Pr. PB08] for details.
33.7
[ms]
0.1 to
1000.0
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































