




























5. PARAMETERS
5 - 13
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
PA03
*ABS
Absolute position detection system
Set this parameter when using the absolute position detection system.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x
Absolute position detection system selection
0: Disabled (used in incremental system)
1: Enabled (used in absolute position detection system)
0h
_ _ x _
For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
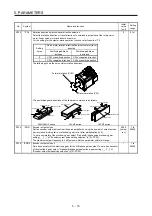
PA04
*AOP1 Function selection A-1
This is used to select the forced stop input and forced stop deceleration function.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x
For manufacturer setting
0h
_ _ x _
0h
_ x _ _
Servo forced stop selection
0: Enabled (The forced stop input EM2 or EM1 is used.)
1: Disabled (The forced stop input EM2 and EM1 are not used.)
Refer to table 5.1 for details.
0h
x _ _ _
Forced stop deceleration function selection
0: Forced stop deceleration function disabled (EM1)
2: Forced stop deceleration function enabled (EM2)
Refer to table 5.1 for details.
2h
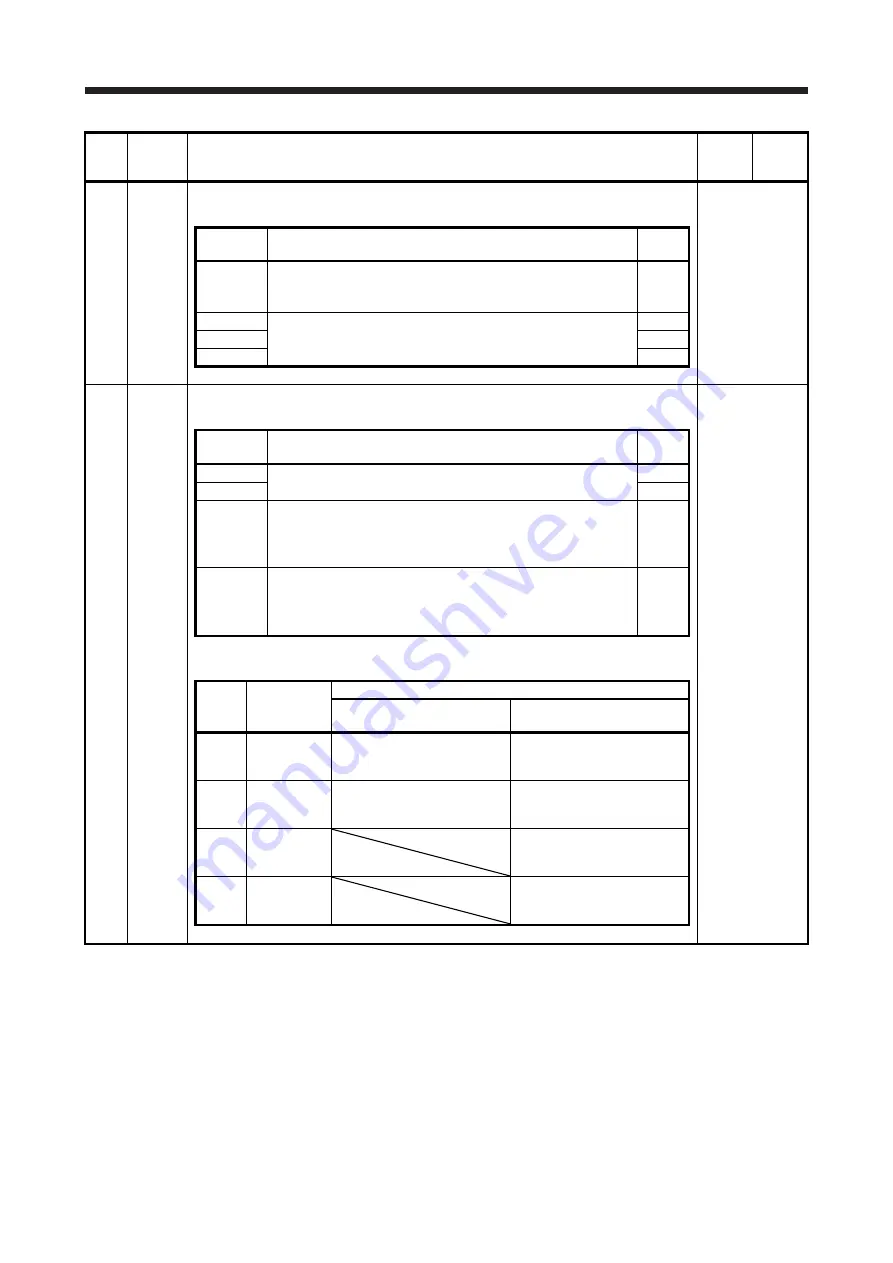
Table 5.1 Deceleration method
Setting
value
EM2/EM1
Deceleration method
EM2 or EM1 is off
Controller forced stop is
enabled/Alarm occurred
0 0 _ _
EM1
MBR (Electromagnetic brake
interlock) turns off without the
forced stop deceleration.
MBR (Electromagnetic brake
interlock) turns off without the
forced stop deceleration.
2 0 _ _
EM2
MBR (Electromagnetic brake
interlock) turns off after the
forced stop deceleration.
MBR (Electromagnetic brake
interlock) turns off after the
forced stop deceleration.
0 1 _ _ Not using
EM2 and
EM1
MBR (Electromagnetic brake
interlock) turns off without the
forced stop deceleration.
2 1 _ _ Not using
EM2 and
EM1
MBR (Electromagnetic brake
interlock) turns off after the
forced stop deceleration.
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































