





























6.2
Motion settings
Motion settings can be made for the following functions:
Motor/encoder standstill detection
Conditioning of the encoder signal
Behaviour in the event of inverter disable
Settings in the »EASY Starter«:
•
Tab Settings - Parameter dialog Motion
6.2.1
Quick stop
The quick stop function is used for stopping the axis and in the event of an error.
The ramp used can be set via the following parameters:
•
•
Quick stop jerk
If the quick stop function is active, it is displayed in the Status word parameter.
Bit 13.
Special features of quick stop:
•
Setpoint generation for the quick stop function starts at the current actual speed.
•
The quick stop function starts with the acceleration 0.
Exception: If the axis is already in the deceleration phase, the start is performed with the
active setpoint acceleration to avoid prolonging the existing braking process.
•
During the deceleration, a change to speed-controlled operation takes place.
•
A transition to position control takes place when a standstill has been reached.
•
There is no reduction in torque while the stop is being performed.
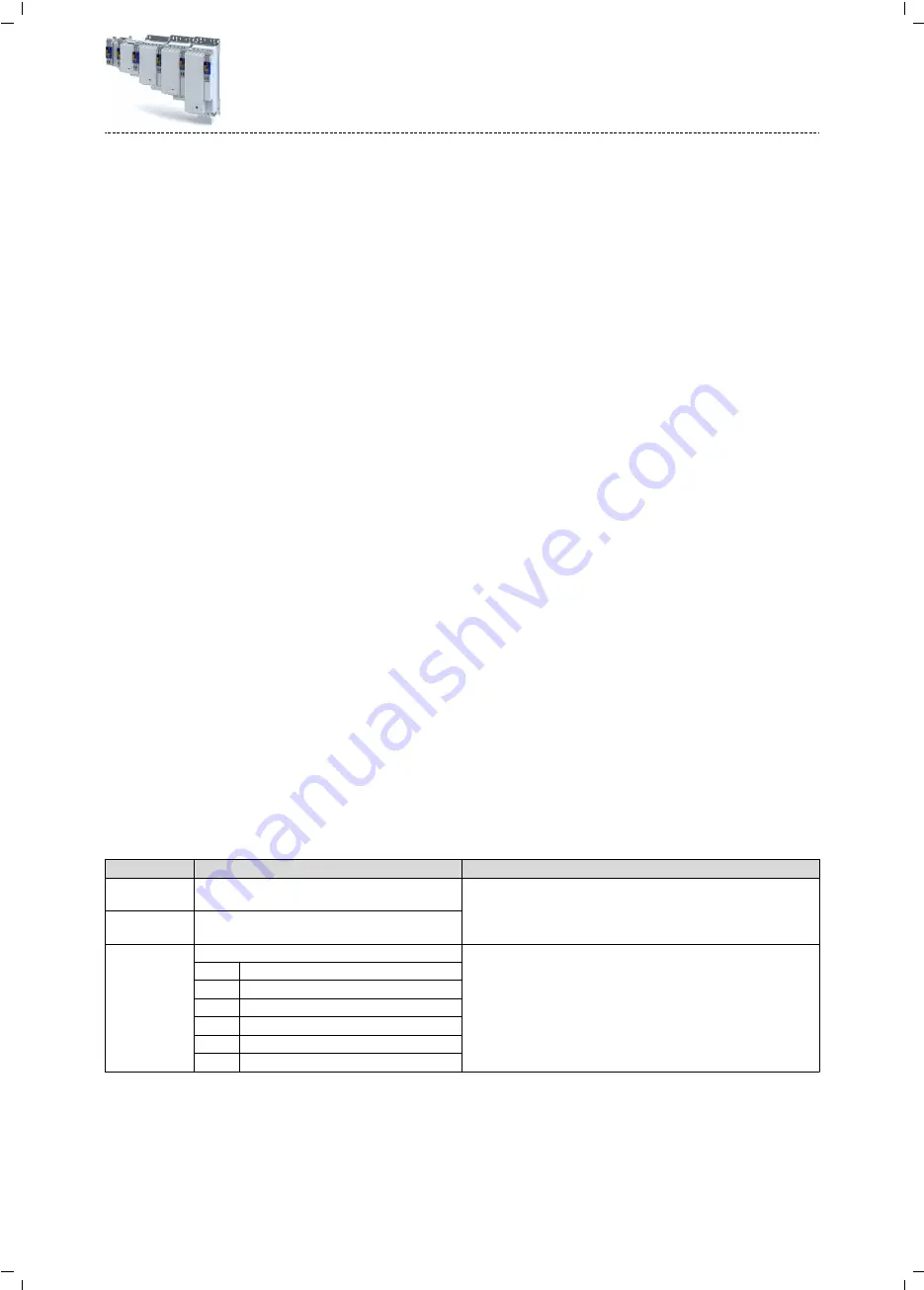
Parameter
Address
Name / setting range / [default setting]
Info
0x500A:048
Application quick stop - deceleration
0.01 ... [3600.00] ... 21474836.47
0x500A:049
Application quick stop - jerk
0.00 ... [0.00] ... 21474836.47
0x5020:007
Application quick stop source
Selection of the signal source for activating the quick stop.
0 FALSE
1 TRUE
2 Digital input 1
3 Digital input 2
4 Digital input 3
5 Digital input 4
Technology application (TA) basic settings
Motion settings
Quick stop
53
Содержание i950 Series
Страница 1: ...Inverters i950 servo inverters Commissioning EN ...
Страница 2: ......
Страница 312: ...15 Configure engineering port The given path leads you to the engineering port Configure engineering port 312 ...
Страница 397: ...19 Safety functions Supported safety functions for Basic Safety STO 4Safe Torque Off STO 398 Safety functions 397 ...
Страница 497: ......
Страница 498: ......
Страница 499: ......







































































