




























GSK988T Turning CNC System User Manual
156
Ⅰ
Programming
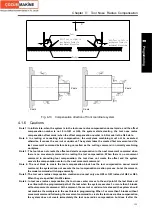
distances from the standard point to the tool nose radius center than from the standard point to the
imaginary tool nose, and so set the tool offset value by measuring distance from the standard point to
the imaginary tool nose(tool nose direction of T3).
Fig. 4-10 Tool offset value of tool post center as benchmark
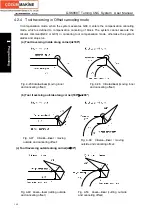
4.1.4 G40/G41/G42 command function
Taking the previous and the current position increment as the programmed path can cancel the
tool compensation mode, and its direction is the compensation direction of the previous. When the
system specifies
(
I, J
)
,
(
I, K
)
or
(
J, K
)
, the vector defined by it can replace the current position
increment to execute the count.
Command format:
X Z T ;
In machining workpiece, the tool offset cannot easily compensate the precise workpiece because
of the tool nose circle degree but the tool nose radius compensation function can automatically
compensate the error.
G40 Xp Yp Zp I J K
G40
G41
G42
G00
G01
Содержание 988T
Страница 6: ...GSK988T Turning CNC System User Manual VI ...
Страница 14: ...GSK988T Turning CNC System User Manual XIV ...
Страница 15: ...Chapter 1 Programming Fundamentals 1 Ⅰ Programming Ⅰ PROGRAMMING ...
Страница 16: ...GSK988T Turning CNC System User Manual 2 Ⅰ Programming ...
Страница 194: ...GSK988T Turning CNC System User Manual 180 Ⅰ Programming ...
Страница 195: ...Chapter Ⅰ Overview 181 Ⅱ Operation Ⅱ OPERATION ...
Страница 196: ...GSK988T Turning CNC System User Manual 182 Ⅱ Operation ...
Страница 215: ...Chapter Ⅲ Windows 201 Ⅱ Operation Note It can be displayed after U disk is inserted in the U disk catalog ...
Страница 217: ...Chapter Ⅲ Windows 203 Ⅱ Operation ...
Страница 267: ...Chapter Ⅲ Windows 253 Ⅱ Operation Fig 3 51 Fig 3 52 ...
Страница 412: ...GSK988T Turning CNC system User Manual 398 Appendix Fig 3 5 Horizontal operation panel appearance dimension ...







































































