





























10.3 Speed- / velocity limits
l
P 328[0] - CON_SCON_SMax
can be used to set the maximum speed limit.
In the default setting the speed limit is the same as the rated speed of the
motor. The possible setting range is 0-2000%. The parameter cannot be
changed during operation. A change is only effective after restarting the
control.
l
P 337[0] - CON_SCON_SMaxScale
enables the torque limit set in
P 328[0]
to be scaled online – that is, during operation.
l
It is additionally possible via
P 333[0] - CON_SCON_TMaxNeg
and
P 334[0]
- CON_SCON_TMaxPos
to change the torque limit for different directions of
rotation during operation.
l
P 744[0] - MON_SDiffMax
is used to specify the permissible difference
between the setpoint speed and the actual speed (tracking error) in
revolutions.
l
P 745[0] - MON_RefWindow
is used to define the point at which the setpoint
is considered to have been reached.
ID
Index Name
Unit Description
167
0
MPRO_REF_OVR
%
Motion profile override factor
328
0
CON_SCON_SMax
%
Speed control maximum speed
333
0
CON_SCON_SMaxNeg
%
Scaling of negative motor speed limit
334
0
CON_SCON_SMaxPos
%
Scaling of positive motor speed limit
335
0
CON_SCON_DirLock
Direction lock for speed reference value
337
0
CON_SCON_SMaxScale %
Scaling of motor speed limit
740
0
MON_SpeedThresh
rpm Monitoring speed threshold
744
0
MON_SDiffMax
rpm Speed tracking error
Table 10.3: “Limits / thresholds - Speed limits” parameters
MOOG
ID No.: CB40859-001 Date: 11/2020
MSD Servo Drive - Device Help
312
10 Limitations / Thresholds
10.4 Position limitation
l
Position limiting is only applicable in positioning mode and will be enabled
only once homing is successfully completed (see Section "Homing" on page
249).
l
P 2235[0] - MPRO_402_SoftwarePosLimit
is used to define the lower
position limit.
P 2235[1] - MPRO_402_SoftwarePosLimit
is used to define
the upper position limit. This function is also referred to as “software limit
switches”.
l
In addition,
P 743[0] - MON_UsrPosDiffMax
can be used to define the
maximum tracking error.
l
P 746[0] - MON_UsrPosWindow
can be used to define the zero speed
window (position setpoint reached).
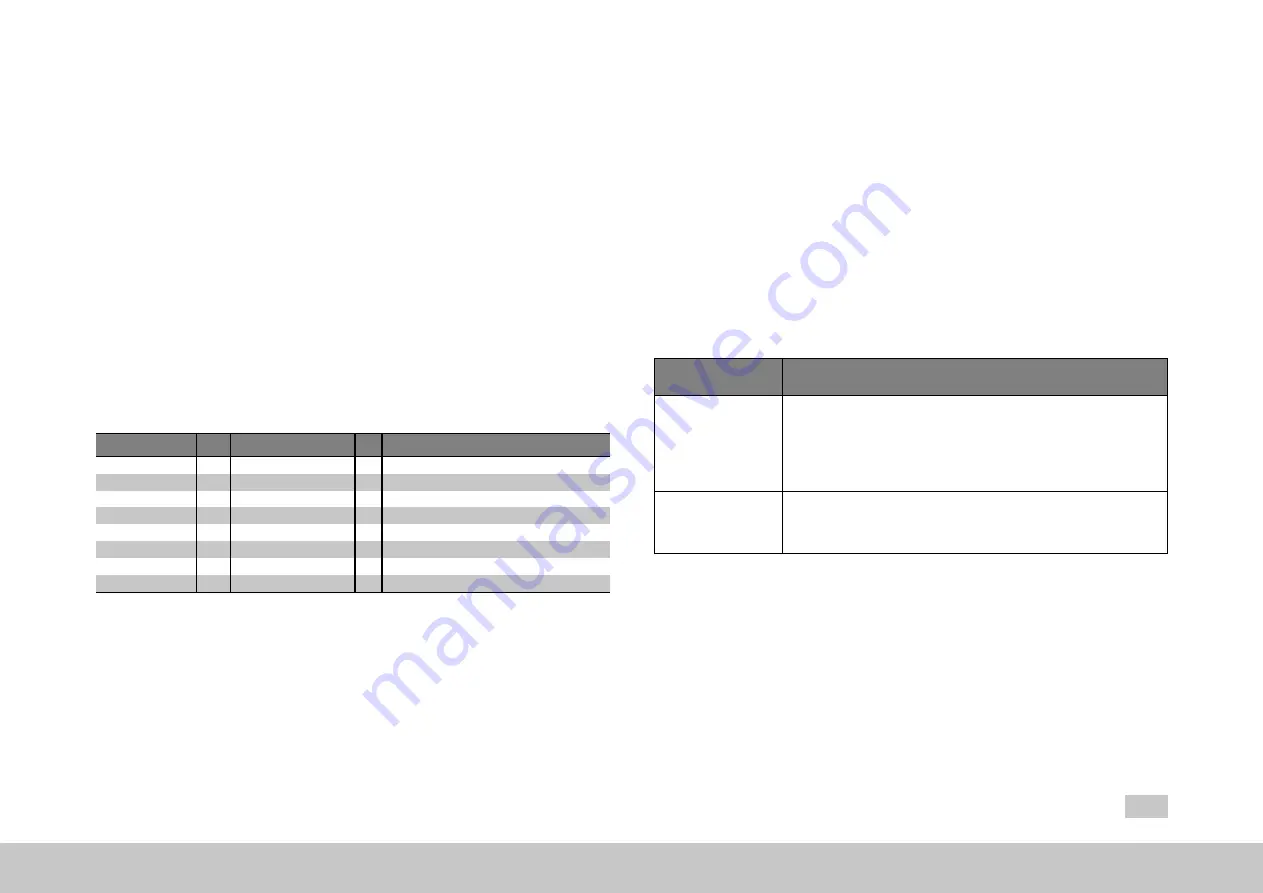
Positioning mode
Function
Absolute
Before enabling an absolute motion task, a check is made
whether the target is in the valid range – that is, within the
software limit switches. If the target is outside, no motion task
is signalled and the programmed error reaction as per
P 30
Error Reactions
is executed.
Endless
This mode can only be used when using speed-controlled
operation. The drive travels until a software limit switch is
detected. Then the programmed error reaction is executed.
Table 10.4: Positioning mode







































































