





























ID
Index Name
Unit
Description
304
0
CON_SConTS
ms
Speed control sampling time
2939
0
CON_SCON_TorqueTF
ms
Actual torque filter time
Digital filter
Digital filter / speed controller settings
325
CON_SCON_FilterFreq
Filter frequencies of digital filter
325
0
CON_SCON_FilterFreq
Hz
1st center/cutoff
325
1
CON_SCON_FilterFreq
Hz
1st width
325
2
CON_SCON_FilterFreq
Hz
2nd center/cutoff
325
3
CON_SCON_FilterFreq
Hz
2nd width
326
0
CON_SCON_FilterAssi
Digital filter design assistant
327
CON_SCON_FilterPara
Coefficients of digital filter
327
0
FilterPara b0
b0*x(k)
327
1
FilterPara b1
b1*x(k-1)
327
2
FilterPara b2
b2*x(k-2)
327
3
FilterPara b3
b3*x(k-3)
327
4
FilterPara b4
b4*x(k-4)
327
5
FilterPara a1
a1*y(k-1)
327
6
FilterPara a2
a2*y(k-2)
327
7
FilterPara a3
a3*y(k-3)
327
8
FilterPara a4
a4*y(k-4)
1550
0
SCD_NotchType
Adaptive Notch filter: Method
1551
0
SCD_NotchCntl
Adaptive Notch filter: Control word
1552
SCD_NotchFreq
Adaptive Notch filter: Frequencies
1552
0
SCD_NotchFreq
Hz
Adaptive Notch filter: Frequency
1552
1
SCD_NotchLambda
Hz/min^-
2
Adaptive Notch filter: Coefficient
1552
2
SCD_NotchMinFreq
Hz
Adaptive notch filter: Minimum frequency
1552
3
SCD_NotchMaxFreq
Hz
Adaptive notch filter: Maximum frequency
1552
4
SCD_NotchDeltaFreq
Hz
Adaptive Notch filter: Maximum frequency
change (in each iteration)
Analysis of speed control
Advanced analysis of the speed controller
401
0
CON_SCON_AddTRef
Nm (N)
Additive torque reference
402
0
CON_SCON_AddSRef
1/min
Additive speed reference value (without ramp)
Scope signals (advanced)
Observer
Scope signals (basic)
Table 7.12: “Speed controller” parameter (continue)
MOOG
ID No.: CB40859-001 Date: 11/2020
MSD Servo Drive - Device Help
133
7 Control
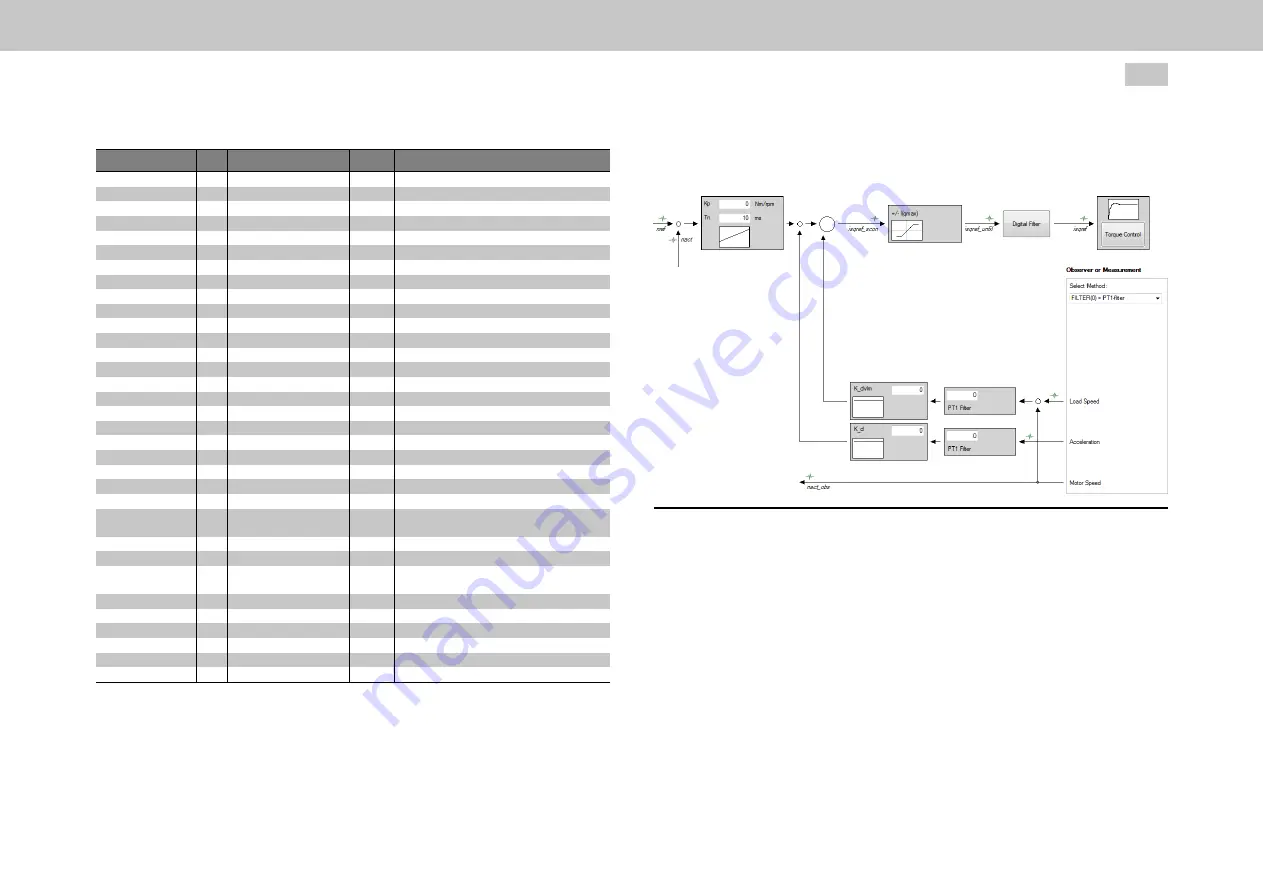
7.4.1 Advanced speed control
Image 7.22: “Speed controller advanced setup” screen
7.4.1.1 Speed observer
The speed observer is a simple model of the path with motor current as input, as
estimation of load torque and feedback of the estimated error from encoder position
for speed control. The observer generates an estimation of motor speed that is used
as an alternative to the measured, filtered speed of the axis.
Procedure for using the observer
l
Make sure that the mass inertia of the system (
P 1516[0] - SCD_JSum
) is
known. To do so, determine the inertia of the system (see section “Section
"Automatic inertia detection" on page 111”), if this has not yet been done.







































































