





























9 Parameterization
110
9.2
Parameter Sets (Controller parameter)
The parameters for the controller channels determine the control response of
the individual control circuits. For stable control response, these parameters
must be matched to the prevailing process conditions. Each controller channel
has two parameter sets; the selection is made by means of a binary signal. "Pa-
rameter set 1" is active by default. The second set can be activated as an alter-
native via the binary signal. In this way, it is possible to match each controller
channel to the changing process conditions in order to maintain a stable control
response.
The best parameter settings can usually be found by the controllers' self-optimi-
zation function. This approach, however, works only with linear processes.
Operating the controllers Page 93
For nonlinear processes (control paths), it is advisable to set the parameters
manually.
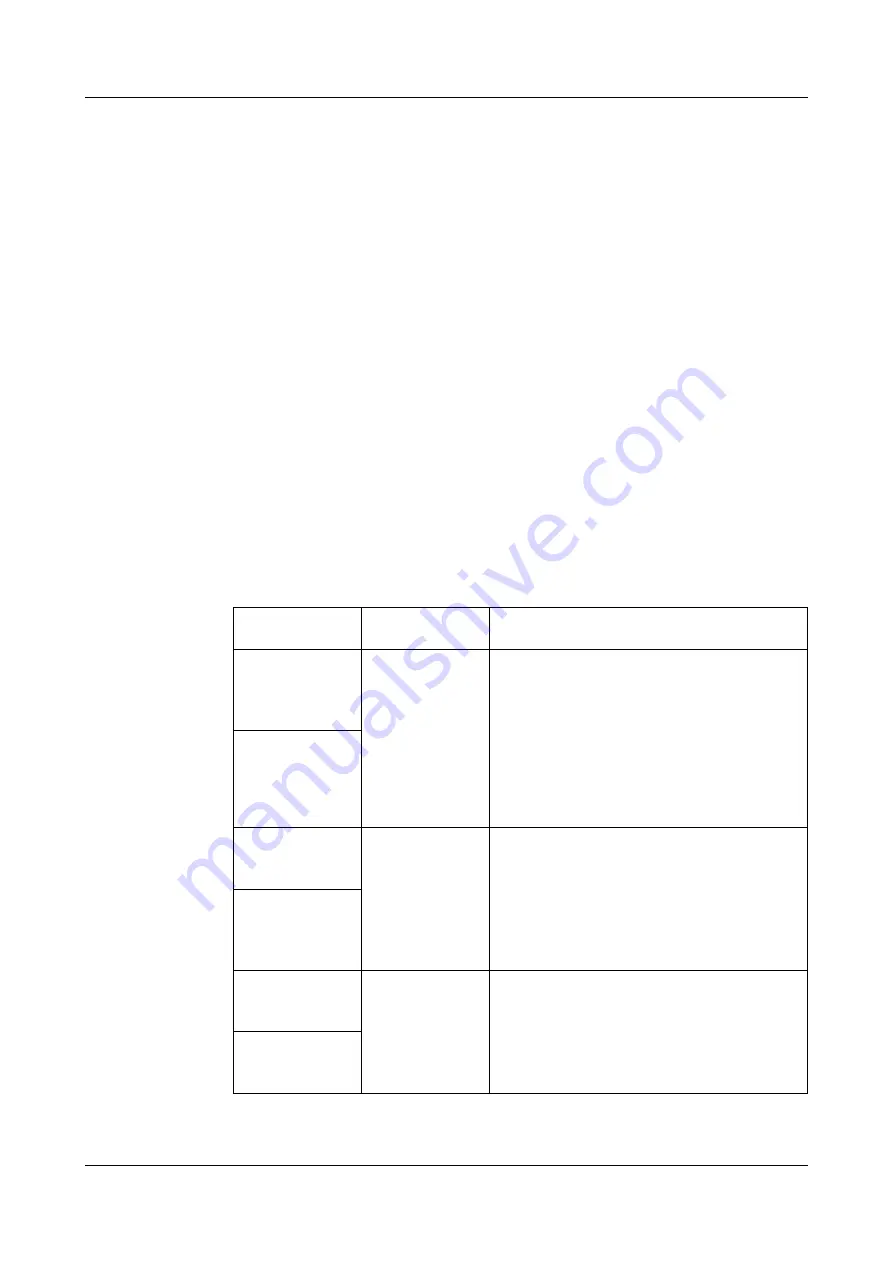
The following table provides an overview of the parameter sets for the controller
channels. Depending on the configuration of the particular controller channel,
only valid parameters are active for entry. Those not used appear in light gray,
but cannot be edited. Duplicate parameters refer to the first and second control-
ler output.
Open:
Device Menu
r
Parameterization
r
Parameter
Sets
r
Controller 1 to 4
r
Parameter Set 1 and 2
.
Parameter
(Formula sym.)
Setting op-
tions
Explanation
Proportional-
range 1
(X
p1
)
0 to 9999.9
(Unit
dependent on
the actual value
input variable)
factory setting:
0.0
Range of the actual value in which the con-
troller output is proportional to the control
deviation. The smaller the proportional
band selected, the larger the change in
controller output for the control deviation.
If the proportional band is set to a value of
0, the controller functions automatically as
a limit monitor without a PID controller
structure.
Proportional-
range 2
(X
p2
)
Rate time 1
(T
v1
)
0 to 9999 s
factory setting:
80.0 s
Affects the derivative component (D-term)
of the controller output signal. The purpose
of the D-term is to damp the change of the
actual value with time, and thereby sup-
press the hunting tendency.
The effect of the D-term increases as the
derivation time increases
Derivative time
2
(T
v2
)
Reset time 1
(T
n1
)
0 to 9999 s
factory setting:
350.0 s
Affects the integral component (I-term) of
the controller channel.
The purpose of the I-term is to minimize
persistent control deviations. The effect of
the I-term decreases as the reset time in-
creases.
Reset time 2
(T
n2
)
Содержание AQUIS touch P 202580
Страница 12: ...Content...
Страница 26: ...4 Identifying the device version 26...
Страница 29: ...29 5 Mounting Mounting depth with Ci conductivity sensor 283 3 mm 2 3 mm 36 mm 25 mm 23 2 mm...
Страница 32: ...5 Mounting 32...
Страница 64: ...7 Startup 64...
Страница 100: ...1 2 3 4 5...
Страница 107: ...107 8 Operation Example of a Quad View...
Страница 108: ...8 Operation 108...
Страница 114: ...9 Parameterization 114...
Страница 160: ...10 Configuration 160...
Страница 182: ...13 Calibrating a pH measuring chain 182...
Страница 196: ...16 Calibrating CR conductivity sensors 196...
Страница 206: ...17 Calibrating Ci conductivity sensors 206...
Страница 214: ...18 Calibrating universal inputs 214...
Страница 228: ...19 PC Setup Program 228...
Страница 319: ...319 20 Technical data...
Страница 320: ...20 Technical data 320...
Страница 321: ......







































































