





























EXPERT Standard Series User Manual
164
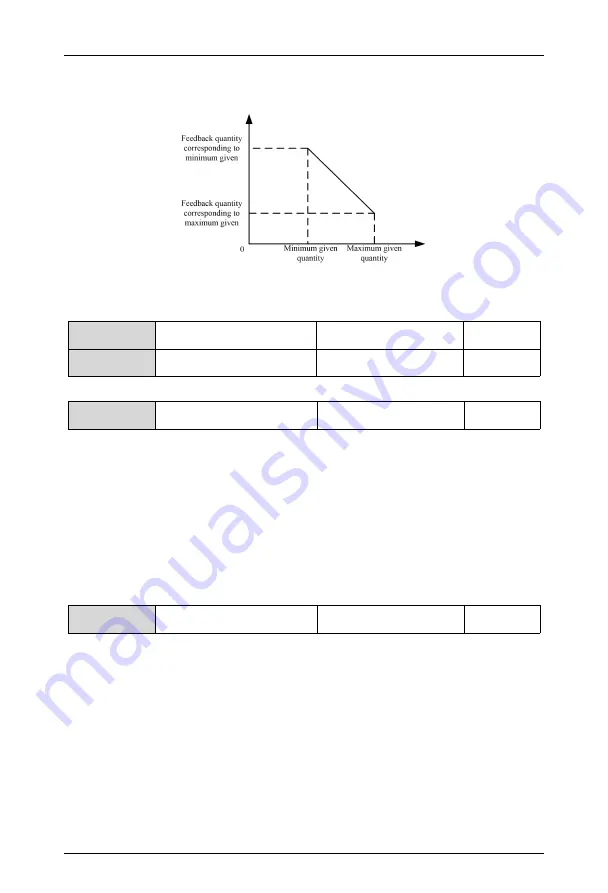
Feedback negative regulation
Figure 6-42 Given and Feedback Curves Schematic Diagram 2
F8.12
Proportional gain KP
0.000~9.999
0.400
F8.13
Integral gain Ki
0.000~9.999
2.000
F8.14
Setting of sampling period
T
0.001~50.000s
0.100s
The larger the proportional gain KP, the faster the response, but if it is too large,
oscillation will occur.
Only using the proportional gain KP for regulation cannot eliminate the deviation
completely. In order to eliminate the residual deviation, you can use the integral gain Ki to
form PI control. The larger the Ki, the faster the response to change deviation, but if it is too
large, oscillation will occur.
The sampling period T is a sampling period of the feedback quantity, and the PI
regulator operates once in each sampling period. The greater the sampling period, the
slower the response.
F8.15
Deviation limit
0.0~20%
2.0%
The maximum allowable deviation of the system output value relative to the
closed-loop given value is shown in Figure 6-43. When the feedback quantity is within this
range, the PI regulator stops regulating. The proper setting of this function helps to
consider the accuracy and stability of the system output.







































































