



























3
Functional description of the structure switches
3.9 Adaptation (S48)
Manual
SIPART DR21
C73000-B7476-C143-08
113
3.9
Adaptation (S48)
The adaptation procedure represents a reliable and easy to operate commissioning tool. The
adaptation procedure is far superior to manual optimization especially in slow controlled sys-
tems and in PID controller types. It is activated by the operator and can be aborted at any time
in the event of danger. The parameters determined by the adaptation can be changed and ac-
cepted specifically by the user.
In the parameterization mode AdAP which is only accessible at S48
¸
0, the following preset-
tings are made for the adaptation procedure:
tU
Monitoring time
Pv
Direction of step command
dY
Amplitude of step command
With the structure switch S48 the choice of the control behavior (with or without overshoot) is
made.
The adaptation principle is divided into system identification and controller design.
D
System identification
The controller is driven to the desired operating point manually. By pressing the Enter key
the set manual manipulated variable is changed by a step adjustable in the direction (dPv)
and amplitude (dY). The y-step is output at the end of 10 % of the set monitoring time (tU) if
there was a fixed state of the controlled variable during this time. Otherwise there is an error
message with abortion of the identification (see table 5-3, page 162 ).
The step response of the controlled system is then accepted with a max. 84 value pairs
(time and amplitude). The respective main controlled variable of the different control types is
filtered adaptively -- (see figures 3-6, page 61 to figure 3-7, page 62) and provided for sav-
ing. The storage procedure operates with cyclic data reduction and subsequent refilling so
that slow controlled systems can be entered.
After the start ID has been run through (the controlled variable x must have left the start ID
band within 50% of the set monitoring time tU), 95% of the full range must have been re-
ached at the latest at
2
/
3
of tU. The set monitoring time (tU) must be
≥
2
*
T95 of the con-
trolled system with safety reserve. The remaining time is required for the full scale identifica-
tion. The end value identification can also take place immediately after the start
identification, but
1
/
3
of the performed measurements are always required for the end value
identification. Recording of the measured value pairs is ended on identifying the full scale.
A comparison with the recorded transient function is now made based on the stored
Ptn-models with n = 1 to 8 and equal time constants T by variation of n and T. The
determined line gain ks is transfered to the line models. The comparison is made over the
minimum error area F (n, T)
Additionally a special entry of real dead times is made which then shifts the identified control
line to higher orders.
Summary of Contents for SIPART DR21
Page 1: ...SIPART DR21 C73000 B7476 C143 08 1 SIPART DR21 6DR 210 Edition 08 2010 Manual ...
Page 2: ...SIPART DR21 C73000 B7476 C143 08 2 ...
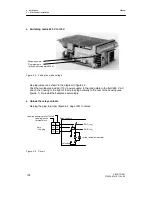
Page 148: ...4 Installation 4 2 Electrical Connection Manual 148 SIPART DR21 C73000 B7476 C143 08 ...
Page 180: ...5 Operation 5 5 CPU self diagnostics Manual 180 SIPART DR21 C73000 B7476 C143 08 ...
Page 242: ...Manual 242 SIPART DR21 C73000 B7476 C143 07 ...







































































