





























11 Troubleshooting
11-18
NJ-series CPU Unit Motion Control User’s Manual (W507)
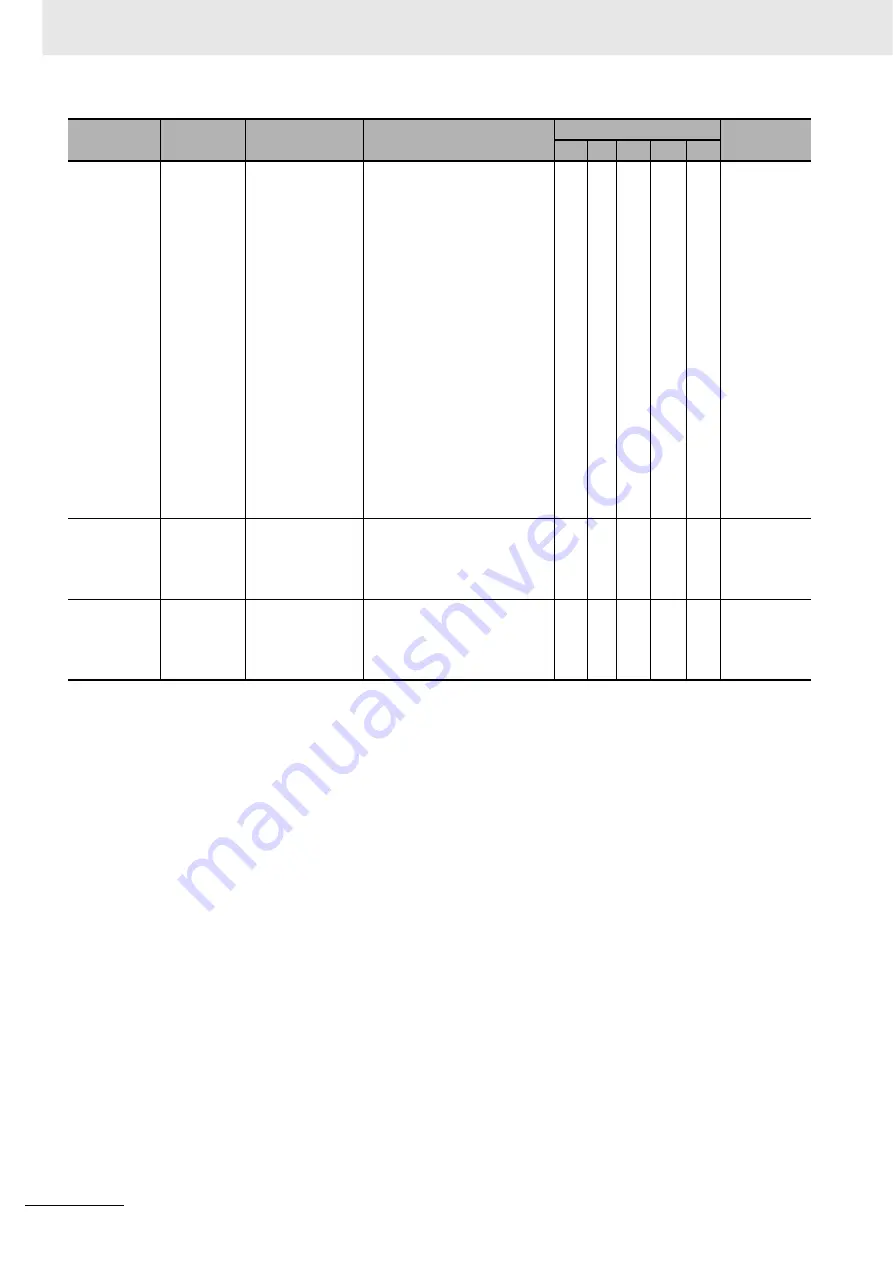
94200000 hex
Notice of
Insufficient
Travel Dis-
tance to
Achieve
Blending
Transit Veloc-
ity
There is not suffi-
cient travel distance
to accelerate or
decelerate to the
transit velocity dur-
ing blending opera-
tion.
•
When the Acceleration/Decel-
eration Over parameter was set
to
Use rapid acceleration/decel-
eration (Blending is changed to
Buffered),
the results of profile
creation caused the accelera-
tion/deceleration rate to be
exceeded when blending was
specified, so buffered was
used.
•
Blending was specified, but the
target position was already
reached, so it was changed to
Buffered because the profile
could not be created.
•
Blending
was specified for an
interpolation instruction, but
based on the results of profile
creation, this was changed to
Buffered
because the execution
time of the instruction before
the transition was four control
periods or less.
√
94210000 hex
Error Clear
from MC Test
Run Tab
Page
An error was
cleared from the
MC Test Run Pane
of the Sysmac Stu-
dio.
•
An error was cleared from the
MC Test Run Pane of the Sys-
mac Studio.
√
94220000 hex
Slave Error
Code Report
The error code was
reported by the
slave when a Slave
Error Detected error
occurred.
•
The error code was reported by
the slave when a Slave Error
Detected error (742F0000 hex)
occurred.
√
Event code
Event name
Meaning
Assumed cause
Level
Reference
Maj
Prt
Min
Obs
Info
Summary of Contents for NJ501-1300
Page 12: ...Sections in this Manual 10 NJ series CPU Unit Motion Control User s Manual W507...
Page 18: ...16 NJ series CPU Unit Motion Control User s Manual W507 CONTENTS...
Page 22: ...Read and Understand this Manual 20 NJ series CPU Unit Motion Control User s Manual W507...
Page 34: ...Revision History 32 NJ series CPU Unit Motion Control User s Manual W507...
Page 86: ...3 Configuring Axes and Axes Groups 3 28 NJ series CPU Unit Motion Control User s Manual W507...
Page 122: ...5 Motion Control Parameters 5 24 NJ series CPU Unit Motion Control User s Manual W507...
Page 158: ...6 Motion Control Programming 6 36 NJ series CPU Unit Motion Control User s Manual W507...
Page 166: ...7 Manual Operation 7 8 NJ series CPU Unit Motion Control User s Manual W507...
Page 182: ...8 Homing 8 16 NJ series CPU Unit Motion Control User s Manual W507...
Page 346: ...10 Sample Programming 10 92 NJ series CPU Unit Motion Control User s Manual W507...
Page 422: ...Appendices A 18 NJ series CPU Unit Motion Control User s Manual W507...
Page 423: ...Index 1 NJ series CPU Unit Motion Control User s Manual W507 I Index...
Page 430: ...Index 8 NJ series CPU Unit Motion Control User s Manual W507 Index...





















































