





























5 Motion Control Parameters
5-6
NJ-series CPU Unit Motion Control User’s Manual (W507)
*
Busy
(Controlling) changes to TRUE if you execute a motion control instruction for an undefined or unused axis.
Busy
changes to FALSE when
Execute
or
Enable
changes to FALSE. You can set axes as unused axes to enable
using the same user program for different axis configurations without the need to delete programming for axes
that are not used.
The following table describes the different axis types that you can select in the Axis Type parameter.
*1
The applicable Servo Drives are the OMRON G5-series Servo Drives with Built-in EtherCAT Communications.
*2
The applicable Encoder Input Terminals are the OMRON GX-series GX-EC0211/EC0241 Encoder I/O Termi-
nals.
*3
Virtual encoder axes are used in combination with motion control instructions that update the actual position of
the virtual encoder axis. They cannot be used in place of encoder axes for versions of the MC Function Module
that do not support such instructions.
z
Virtual Servo Axes
A virtual servo axis does not have a physical encoder or external I/O signals. Therefore, virtual servo
axes differ from servo axes in the following ways.
•
They are always in Servo ON state.
•
The actual current position equals the command current position.*
•
The actual current velocity equals the command current velocity.*
•
External input signals cannot be used.
•
If the MC_Home instruction is executed, the instruction is processed as a zero position preset
regardless of the setting of the Homing Method axis parameter.
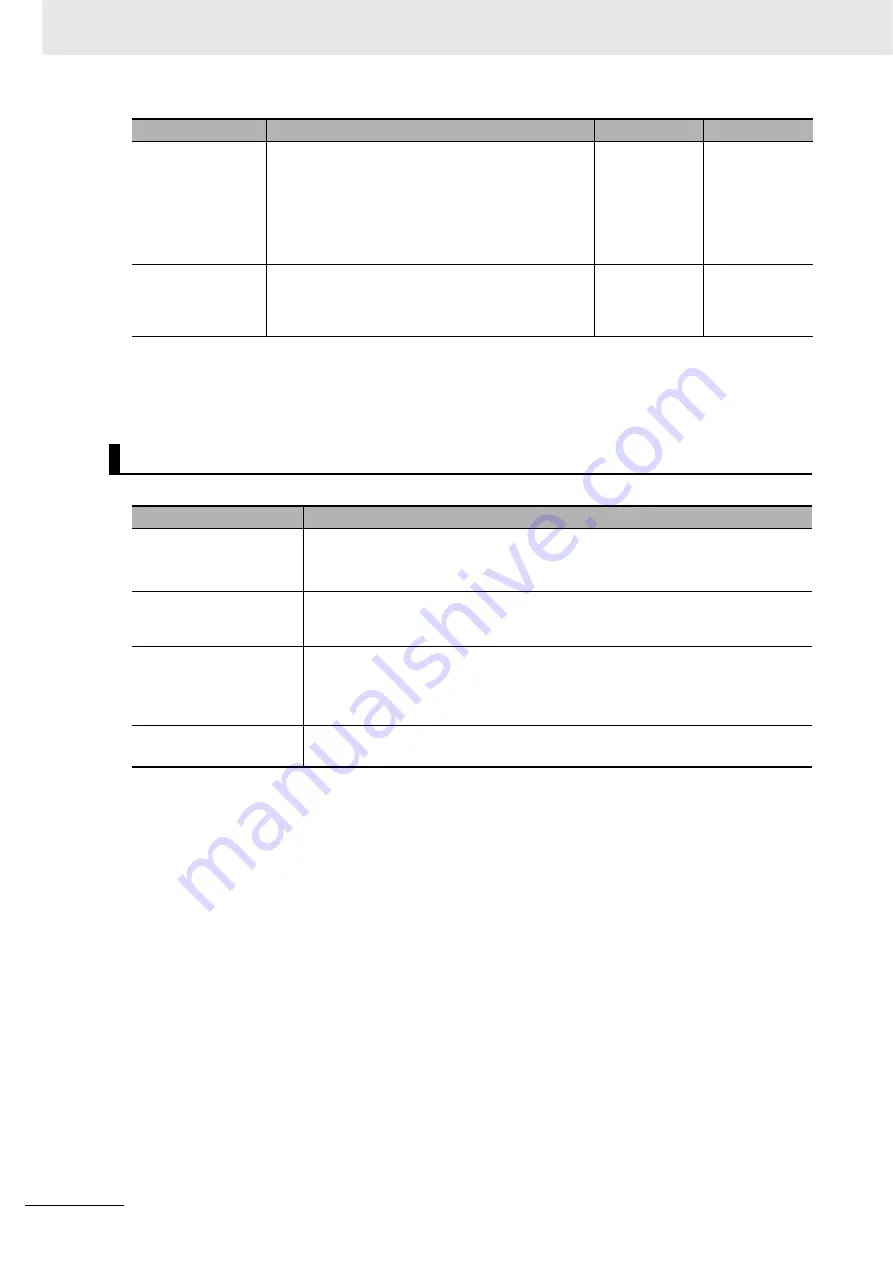
Axis Type
Set the axis type. I/O wiring is not required for virtual
axes.
0: Servo axis
1: Encoder axis
2: Virtual servo axes
3: Virtual encoder axis
0 to 3
0
Node Address (input
devices and output
devices)
Specify the node address of the EtherCAT slave
device that is assigned to the axis. The Node
Address parameter cannot be selected if the Axis
Type parameter is set to a virtual axis.
0 to 192
0
Axis Types
Axis type
Description
Servo axis
These axes are used by the EtherCAT slave Servo Drives
*1
. They are assigned to
actual Servo Drives.
One Servomotor is used as one axis.
Virtual servo axis
These virtual axes exist only inside the MC Function Module. They are not used by
actual Servo Drives. For example, they are used as master axes for synchronizing
control.
Encoder axis
An encoder axis is used for an EtherCAT slave encoder input terminal
*2
. An
encoder axis is assigned to an actual encoder input terminal.
If one encoder input terminal contains two counters, each counter will act as one
axis.
Virtual encoder axis
These virtual axes are used for encoder operation. A virtual encoder axis is used
temporarily in place of an encoder axis when there is no physical encoder.
*3
Parameter name
Function
Setting range
Default
Summary of Contents for NJ501-1300
Page 12: ...Sections in this Manual 10 NJ series CPU Unit Motion Control User s Manual W507...
Page 18: ...16 NJ series CPU Unit Motion Control User s Manual W507 CONTENTS...
Page 22: ...Read and Understand this Manual 20 NJ series CPU Unit Motion Control User s Manual W507...
Page 34: ...Revision History 32 NJ series CPU Unit Motion Control User s Manual W507...
Page 86: ...3 Configuring Axes and Axes Groups 3 28 NJ series CPU Unit Motion Control User s Manual W507...
Page 122: ...5 Motion Control Parameters 5 24 NJ series CPU Unit Motion Control User s Manual W507...
Page 158: ...6 Motion Control Programming 6 36 NJ series CPU Unit Motion Control User s Manual W507...
Page 166: ...7 Manual Operation 7 8 NJ series CPU Unit Motion Control User s Manual W507...
Page 182: ...8 Homing 8 16 NJ series CPU Unit Motion Control User s Manual W507...
Page 346: ...10 Sample Programming 10 92 NJ series CPU Unit Motion Control User s Manual W507...
Page 422: ...Appendices A 18 NJ series CPU Unit Motion Control User s Manual W507...
Page 423: ...Index 1 NJ series CPU Unit Motion Control User s Manual W507 I Index...
Page 430: ...Index 8 NJ series CPU Unit Motion Control User s Manual W507 Index...







































































