





























4-133
4-3 Functions When Option PG Board (3G3AX-PG01) Is Used
4
Func
tions
In the absolute position control mode, the Inverter moves to the target position according to the fol-
lowing parameter settings, and is then set in the position servo lock status.
• Position command
• Speed command (frequency reference)
• Acceleration/Deceleration time
(The servo lock status is retained until the RUN command is turned off.)
The frequency reference and acceleration/deceleration command for absolute position control con-
form to the items selected when the RUN command is turned on.
If the position command is set to a low value, the Inverter may stop deceleration and perform posi-
tioning before the speed command value is reached.
In the absolute position control mode, the direction of RUN command (FW or RV) does not refer to
the rotating direction. The FW or RV signal starts or stops the Inverter. The Inverter runs forward
when "Target position - Current position" is a positive value, or runs in reverse when it is a negative
value.
If you do not perform zero return operation, (to be described later), the position at power-on is re-
garded as the origin (position = 0).
When position command is set to "0", positioning is performed when the RUN command is turned
on.
In reset selection C102, select "03" (trip reset only).
* If reset selection C102 is not set to "03", turning on the Inverter's reset terminal (or RESET key)
clears the current position counter. To operate the Inverter by using the current position count value
after resetting a trip by turning on the reset terminal (or RESET key), be sure to set reset selection
C102 to "03".
If PCLR is allocated, turning on the PCLR terminal clears the current position counter.
(The internal position deviation counter is simultaneously cleared.)
The absolute position control mode disables the ATR terminal. (Torque control is disabled.)
The absolute position control mode disables the STAT terminal. (Pulse train position control is dis-
abled.)
The absolute position control mode disables the orientation function.
(However, the ORT terminal is used for teaching, as described later.)
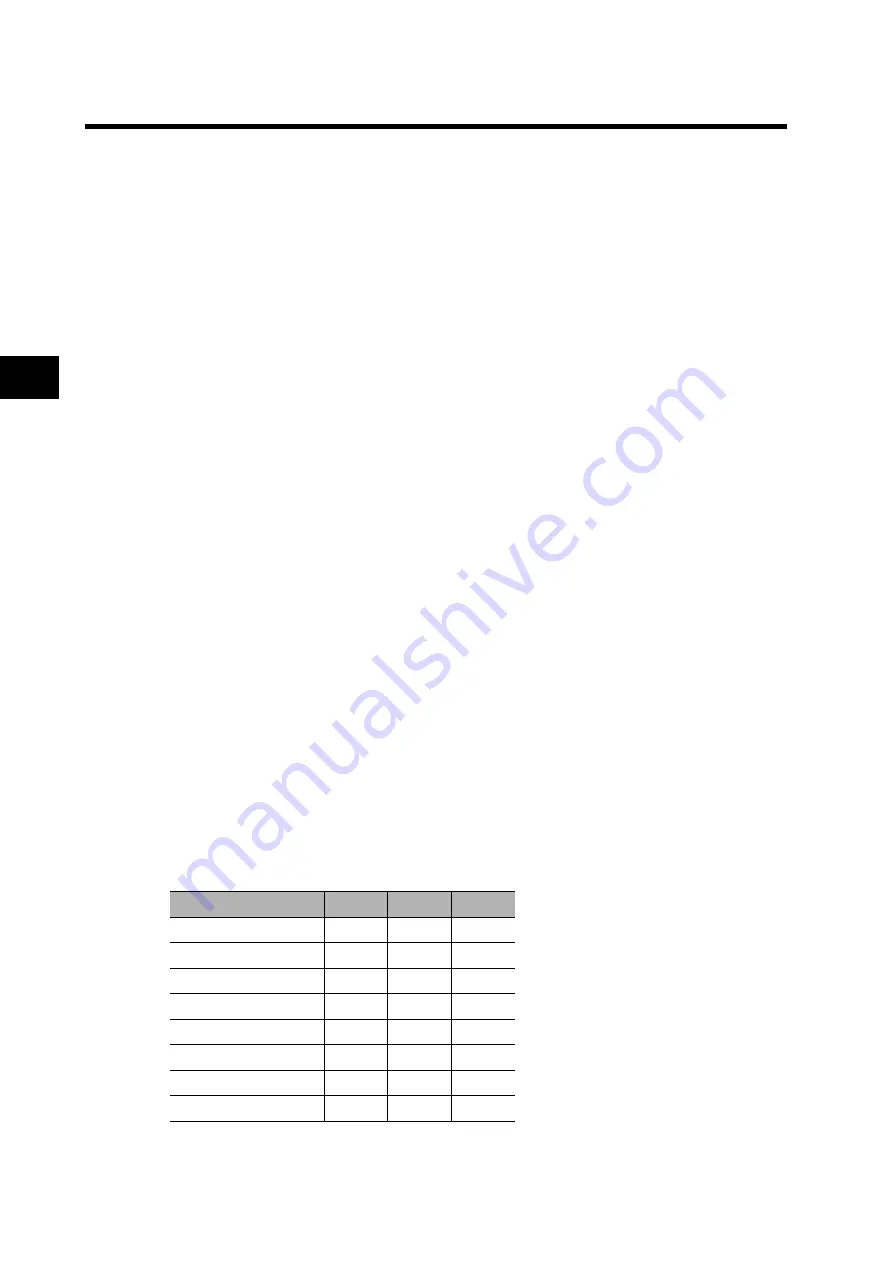
Multi-step Position Switching Function (CP1/CP2/CP3)
By allocating "66" to "68" (CP1 to CP3) to any of multi-function inputs 1 to 8 (C001 to C008), you
can select multi-step positions 0 to 7.
Set position commands in multi-step position commands 0 to 7 (P060 to P067).
If no position command is allocated to the terminals, multi-step position command 0 (P060) is de-
fined as the position command.
Position command
CP3
CP2
CP1
Multi-step position 0
0
0
0
Multi-step position 1
0
0
1
Multi-step position 2
0
1
0
Multi-step position 3
0
1
1
Multi-step position 4
1
0
0
Multi-step position 5
1
0
1
Multi-step position 6
1
1
0
Multi-step position 7
1
1
1
Summary of Contents for 3G3RX Series
Page 1: ...Cat No I560 E1 03 USER S MANUAL SYSDRIVE RXSERIES High function General purpose Inverter ...
Page 2: ......
Page 17: ...Chapter 1 Overview 1 1 Functions 1 1 1 2 Appearance and Names of Parts 1 4 ...
Page 22: ......
Page 23: ...Chapter 2 Design 2 1 Installation 2 1 2 2 Wiring 2 6 ...
Page 48: ......
Page 108: ......
Page 324: ......
Page 337: ...Chapter 6 Inspection and Maintenance 6 1 Inspection and Maintenance 6 1 ...
Page 348: ......
Page 392: ......
Page 436: ......
Page 437: ...Index ...
Page 441: ......







































































