





























9 - 66
Chapter 9 Major Positioning Control
Circular interpolation error compensation
In circular interpolation control with center point designation, the arc path
calculated from the start point address and center point address may deviate from
the position of the end point address set in "[Da.6] Positioning address/movement
amount".
(Refer to "[Pr.41] Allowable circular interpolation error width".)
(1) Calculated error
"[Pr.41] Allowable circular interpolation error width"
Circular interpolation control to the set end point address is carried out while
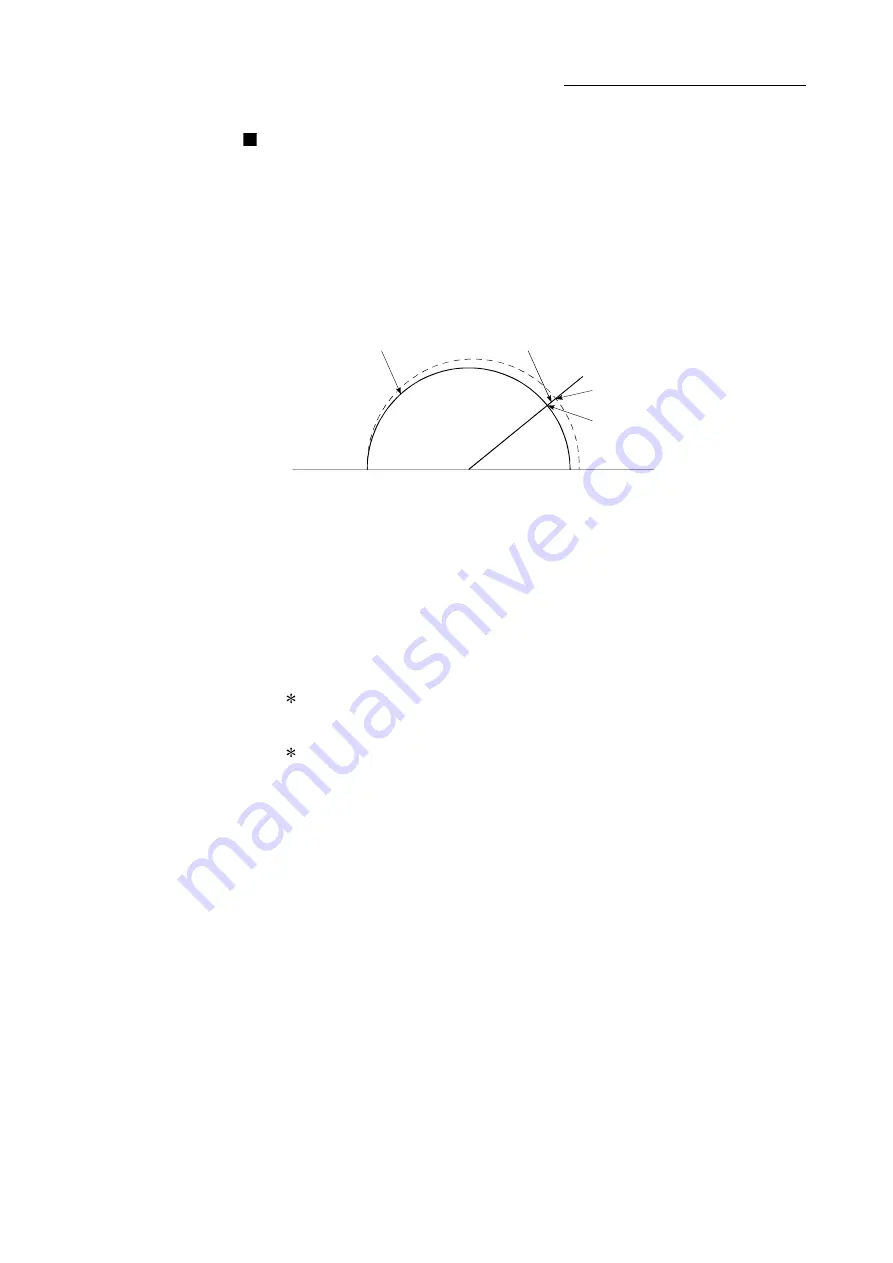
the error compensation is carried out. (This is called "spiral interpolation".)
Path using spiral interpolation
Center point address
Start point address
Error
Calculated end point
address
End point address
In circular interpolation control with center point designation, an angular
velocity is calculated on the assumption that operation is carried out at a
command speed on the arc using the radius calculated from the start point
address and center point address, and the radius is compensated in
proportion to the angular velocity deviated from that at the start point.
Thus, when there is a difference (error) between a radius calculated from the
start point address and center point address (start point radius) and a radius
calculated from the end point address and center point address (end point
radius), the composite speed differs from the command speed as follows.
Start point radius > End point radius: As compared with the speed without
error, the speed becomes slower as
end point address is reached.
Start point radius < End point radius: As compared with the speed without
error, the speed becomes faster as
end point address is reached.
(2) Calculated error > "[Pr.41] Allowable circular interpolation error width"
At the positioning start, the error "Large arc error deviation" (error code: 506)
will occur and the control will not start. The machine will immediately stop if the
error is detected during positioning control.
Summary of Contents for MELSEC Q Series
Page 2: ......
Page 30: ...A 28 MEMO ...
Page 32: ...MEMO ...
Page 97: ...3 29 Chapter 3 Specifications and Functions MEMO ...
Page 102: ...3 34 Chapter 3 Specifications and Functions MEMO ...
Page 282: ...5 162 Chapter 5 Data Used for Positioning Control MEMO ...
Page 374: ...7 16 Chapter 7 Memory Configuration and Data Process MEMO ...
Page 376: ...MEMO ...
Page 400: ...8 24 Chapter 8 HPR Control MEMO ...
Page 425: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Page 528: ...9 128 Chapter 9 Major Positioning Control MEMO ...
Page 554: ...10 26 Chapter 10 High Level Positioning Control MEMO ...
Page 586: ...11 32 Chapter 11 Manual Control MEMO ...
Page 800: ...16 54 Chapter 16 Troubleshooting MEMO ...
Page 830: ...Appendix 30 Appendices MEMO ...
Page 833: ......







































































