





























5 - 57
Chapter 5 Data Used for Positioning Control
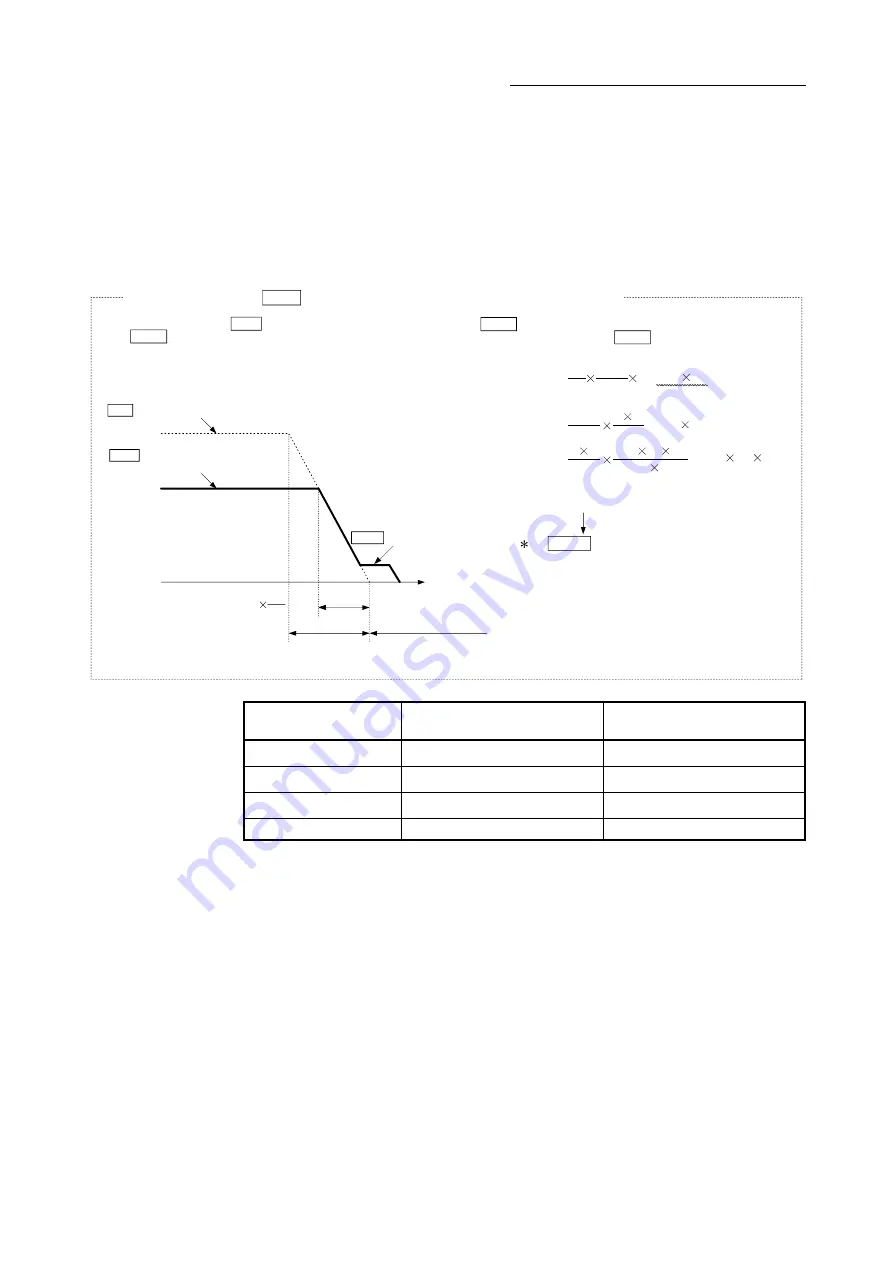
[Pr.50] Setting for the movement amount after proximity dog ON
[RJ010 mode]
When using the count method 1) or 2), set the movement amount to the HP after
the proximity dog signal turns ON.
(The movement amount after proximity dog ON should be equal to or greater than
the sum of the "distance covered by the deceleration from the HPR speed to the
creep speed" and "distance of movement in 10 ms at the HPR speed".)
Deceleration time: Tb=300 ms
Creep speed: Vc=1 kPLS/s
Actual deceleration time: t = Tb
t
Vz
Vp
Pr.47
Speed limit value: Vp=200 kPLS/s
Pr.8
HPR speed:
Vz=10 kPLS/s
Pr.46
[HPR operation]
Example of setting for " Pr. 50 Setting for the movement amount after proximity dog ON"
Assuming that the " Pr. 8 Speed limit value" is set to 200 kPLS/s, " Pr. 46 HPR speed" to 10 kPLS/s,
" Pr. 47 Creep speed" to 1 kPLS/s, and deceleration time to 300 ms, the minimum value of " Pr. 50 Setting for the movement
amount after proximity dog ON" is calculated as follows:
[Deceleration distance] =
1
2
Vz
1000
t + 0.01 Vz
Movement amount for
10ms at HPR speed.
=
Tb Vz
Vp
+ 0.01 Vz
Vz
2000
=
300 10 10
200 10
10 10
2000
3
3
3
+ 0.01 10 10
3
= 75 + 100
= 175
: " Setting for the movement amount
after proximity dog ON" should be equal to
or larger than 175.
Pr.50
[Pr.1] setting value
Value set with GX Works2
(unit)
Value set with sequence program
(unit)
0 : mm
0 to 214748364.7 (
m)
0 to 2147483647 (
10
-1
m)
1 : inch
0 to 21474.83647 (inch)
0 to 2147483647 (
10
-5
inch)
2 : degree
0 to 21474.83647 (degree)
0 to 2147483647 (
10
-5
degree)
3 : PLS
0 to 2147483647 (PLS)
0 to 2147483647 (PLS)
[Pr.51] HPR acceleration time selection
Set which of "acceleration time 0 to 3" to use for the acceleration time during HPR.
Valid only during fast HPR. [CiA402 mode]
0 : Use the value set in "[Pr.9] Acceleration time 0".
1 : Use the value set in "[Pr.25] Acceleration time 1".
2 : Use the value set in "[Pr.26] Acceleration time 2".
3 : Use the value set in "[Pr.27] Acceleration time 3".
Summary of Contents for MELSEC Q Series
Page 2: ......
Page 30: ...A 28 MEMO ...
Page 32: ...MEMO ...
Page 97: ...3 29 Chapter 3 Specifications and Functions MEMO ...
Page 102: ...3 34 Chapter 3 Specifications and Functions MEMO ...
Page 282: ...5 162 Chapter 5 Data Used for Positioning Control MEMO ...
Page 374: ...7 16 Chapter 7 Memory Configuration and Data Process MEMO ...
Page 376: ...MEMO ...
Page 400: ...8 24 Chapter 8 HPR Control MEMO ...
Page 425: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Page 528: ...9 128 Chapter 9 Major Positioning Control MEMO ...
Page 554: ...10 26 Chapter 10 High Level Positioning Control MEMO ...
Page 586: ...11 32 Chapter 11 Manual Control MEMO ...
Page 800: ...16 54 Chapter 16 Troubleshooting MEMO ...
Page 830: ...Appendix 30 Appendices MEMO ...
Page 833: ......







































































