





























User manual of EL8-EC***F AC Servo
194
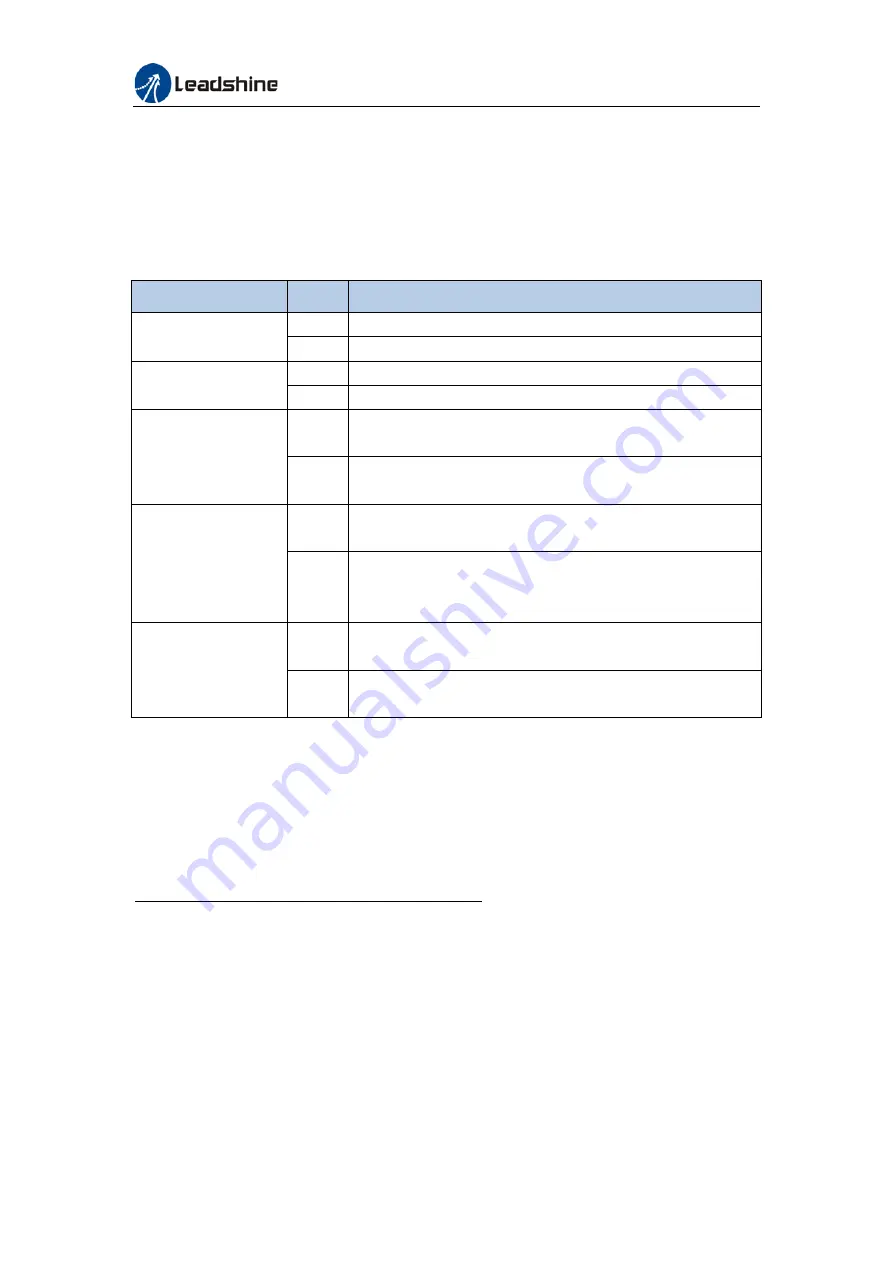
A
:
Command switching time from master device
B
:
Arrival time before target position renewal
C
:
Arrival time after target position renewal
Thick line: Motion before command changed
Thin line
:
Motion after command changed
Status word bits 12-15, 10, 8 definition under PP mode
Bit
Value
Definition
8(Abnormal
Stoppage)
0
Normal motion
1
Abnormal stoppage triggered, motor stopped *1)
10(Arrived at
position)
0
Motion not completed
1
Target position reached
12(New position)
0
Current motion completed/interruptible, able to execute
new position command *2)
1
Current motion not completed/interruptible, unable to
execute new position command
14(Motion
Parameter = 0)
0
Motion parameters valid, necessary parameters all not
set to 0.
1
Parameter = 0 under current motion. One of 3
parameters, Max. velocity (6081h), acceleration (6083h)
and deceleration (6084h) = 0.
15(Trigger)
0
Current motion incomplete/uninterruptable, new target
position cannot be renewed. *3)
1
Current motion completed/interruptible, new target
position can be renewed.
*1) Bit 8 abnormal stoppage usually valid when hardware limit, deceleration stoppage and
quick stop are triggered.
*2) Bit 12 under control word(6040h)bit 5 valid and bit 4 invalid, motion interruptible.
*3) Bit 15 and bit 12 have inversed logic under PP mode.
Application: Realization of relative position motion
Step 1: 6060h = 1, determine if 6061h =1. Servo driver is now under PP mode.
Step 2: Write motion parameters: Target position 607Ah, Max. velocity 6081h,
acceleration 6083h, deceleration 6084h
Step 3: Enable servo driver and switch bit 6 and 4 to realize relative position motion.







































































