





























Absolute System ASDA-A3
10-20
10
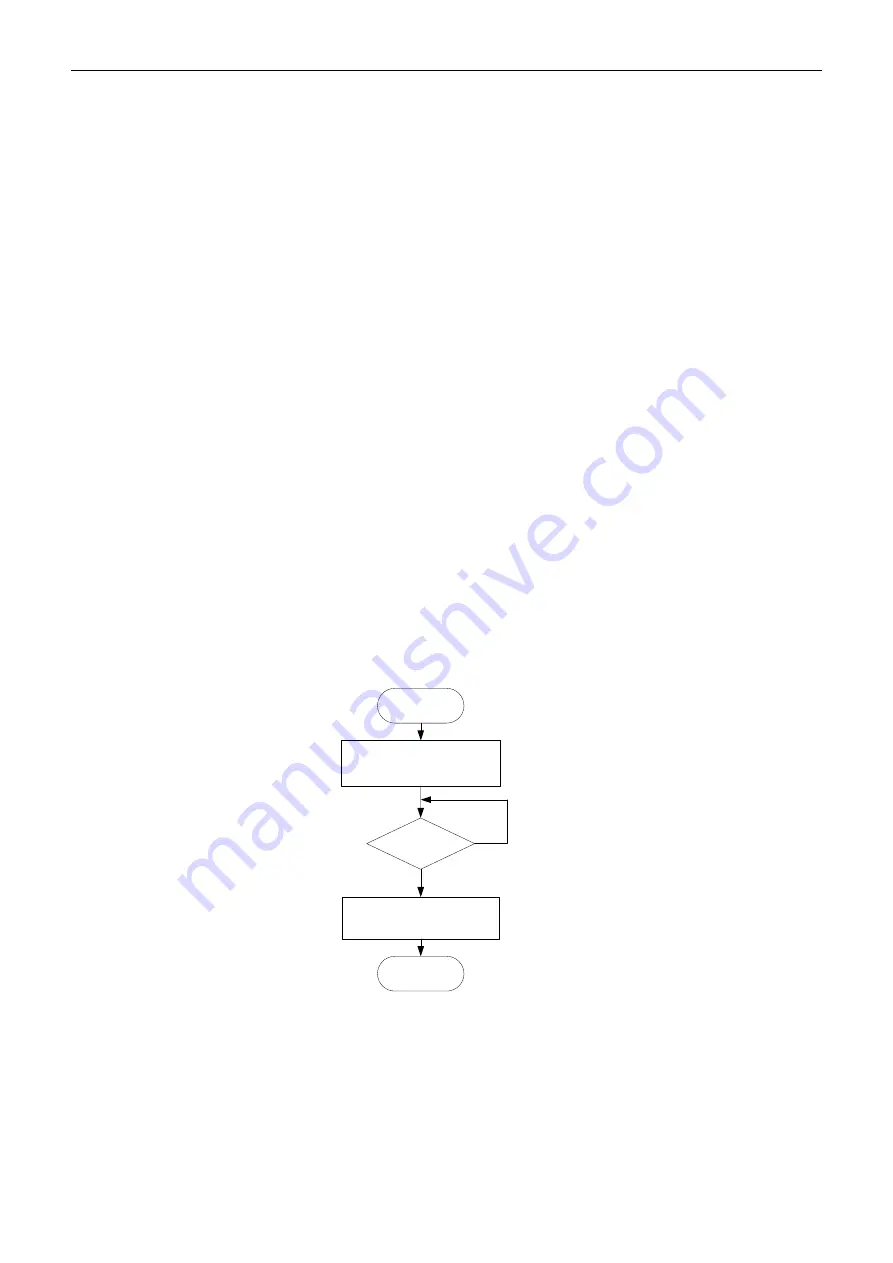
10.3.5.2 Reading the absolute position with communication
You can access the data of the absolute encoder through two communication methods:
instant access or parameter access. Instant access refers to reading the motor’s feedback
position as soon as power is supplied to the servo. When you set the status monitoring register 1
to the motor's feedback pulse number (P0.017 = 0), you can access the motor’s current position
by reading P0.009. Parameter access means the motor’s position is temporarily stored in
parameters. Once you set P0.049 with communication, the encoder status and motor absolute
position (cycle number), and pulse number (or PUU) are stored in P0.050, P0.051, and P0.052
respectively. You can choose to read the pulse number or PUU through P2.070 Bit 1. When P0.049
is set to 1, the drive does not clear the error when reading the position value. If P0.049 is set to 2,
the drive clears the error at the same time when reading the position value. Even when the motor is
stopped, it still moves slightly forward and backward for position correction which is normal for the
servo system. To avoid difference between the read coordinates and the actual positioning of the
motor, set to clear the position error at the same time when reading the coordinates, so the motor’s
actual positioning is changed to the read coordinates, which clears the position error. For example,
the motor’s current position is 20000, but it varies between 19999 and 20001. If you send the
command to read the motor’s position when it stops at 20001, then the motor’s position is updated
to 20001. After all positions are updated in P0.050 - P0.052, P0.049 is automatically reset to 0.
At that point, the controller can access the values of P0.050 - P0.052. P0.050 shows the status of
the absolute encoder. When it shows absolute position lost or cycle number overflow, that indicates
the read absolute position is invalid. You must re-establish the absolute origin coordinates.
Start
Set P0.049 to 1 or 2
Read
P0.050 - P0.052
Stop
No
Yes
Set P0.049
to 0
Содержание ASDA-A3 Series
Страница 15: ... This page is intentionally left blank ...
Страница 89: ...Wiring ASDA A3 3 38 3 Pin assignment for the CN1 quick connector J2 and J1 ...
Страница 91: ...Wiring ASDA A3 3 40 3 Wiring for CN1 quick connector and installation Installation ...
Страница 296: ...ASDA A3 Motion Control 7 99 7 Figure 7 3 4 6 ASDA Soft Speed fitting setting interface for creating E Cam table ...
Страница 320: ...ASDA A3 Motion Control 7 123 7 Figure 7 3 7 14 ASDA Soft rotary shear intermittent printing machine setting interface ...
Страница 373: ...Motion Control ASDA A3 7 176 7 This page is intentionally left blank ...
Страница 605: ...Parameters ASDA A3 8 232 8 This page is intentionally left blank ...
Страница 623: ...MODBUS Communication ASDA A3 9 18 9 This page is intentionally left blank ...
Страница 645: ...Absolute System ASDA A3 10 22 10 This page is intentionally left blank ...
Страница 661: ...Linear Motor ASDA A3 11 16 11 This page is intentionally left blank ...
Страница 793: ...Troubleshooting ASDA A3 13 48 13 This page is intentionally left blank ...
Страница 819: ...Specifications ASDA A3 A 26 A This page is intentionally left blank ...
Страница 841: ...Accessories ASDA A3 B 22 B This page is intentionally left blank ...







































































