

























16. FULLY CLOSED LOOP SYSTEM
16 - 13
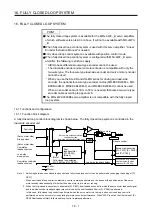
(6) Setting of fully closed loop dual feedback filter
With the initial value (setting = 10) set in [Pr. PE08 Fully closed loop dual feedback filter the dual
feedback filter], make gain adjustment by auto tuning, etc. as in semi closed loop control. While
observing the servo operation waveform with the graph function, etc. of MR Configurator2, adjust the
dual feedback filter.
The dual feedback filter operates as described below depending on the setting.
[Pr. PE08] setting
Control mode
Vibration
Settling time
0
Semi closed loop
1
to
4499
Dual feedback
Not frequently occurs
to
Frequently occurs
Long time
to
Short time
4500
Fully closed loop
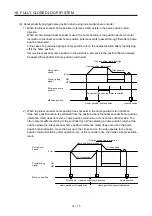
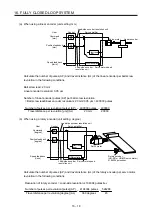
Increasing the dual feedback filter setting shortens the settling time, but increases servo motor vibration
since the motor is more likely to be influenced by the load-side encoder vibration. The maximum setting
of the dual feedback filter should be less than half of the PG2 setting.
Reduction of settling time: Increase the dual feedback filter setting.
Droop pulses
Command
Droop pulses
Command
Time
Time
Suppression of vibration: Decrease the dual feedback filter setting.
Droop pulses
Command
Droop pulses
Command
Time
Time
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......







































































