





























5. PARAMETERS
5 - 35
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
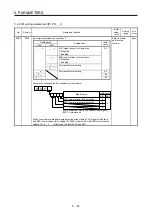
PB58 VRF23B Vibration suppression control 2 - Vibration frequency damping after gain switching
Set a damping of the vibration frequency for vibration suppression control 2 when the
gain switching is enabled.
To enable this, select "3 inertia mode (_ _ _ 1)" of "Vibration suppression mode
selection" in [Pr. PA24].
This parameter will be enabled only when the following conditions are fulfilled.
"Gain adjustment mode selection" in [Pr. PA08] is "Manual mode (_ _ _ 3)".
"Vibration suppression control 2 tuning mode selection" in [Pr. PB02] is "Manual
setting (_ _ 2 _)".
"Gain switching selection" in [Pr. PB26] is "Control command from controller is
enabled (_ _ _ 1)".
Switching during driving may cause a shock. Be sure to switch them after the servo
motor or linear servo motor stops.
0.00 0.00
to
0.30
Each
PB59 VRF24B Vibration suppression control 2 - Resonance frequency damping after gain switching
Set a damping of the resonance frequency for vibration suppression control 2 when
the gain switching is enabled.
To enable this, select "3 inertia mode (_ _ _ 1)" of "Vibration suppression mode
selection" in [Pr. PA24].
This parameter will be enabled only when the following conditions are fulfilled.
"Gain adjustment mode selection" in [Pr. PA08] is "Manual mode (_ _ _ 3)".
"Vibration suppression control 2 tuning mode selection" in [Pr. PB02] is "Manual
setting (_ _ 2 _)".
"Gain switching selection" in [Pr. PB26] is "Control command from controller is
enabled (_ _ _ 1)".
Switching during driving may cause a shock. Be sure to switch them after the servo
motor or linear servo motor stops.
0.00 0.00
to
0.30
Each
PB60
PG1B
Model loop gain after gain switching
Set the model loop gain when the gain switching is enabled.
When you set a value less than 1.0 rad/s, the value will be the same as [Pr. PB07].
This parameter will be enabled only when the following conditions are fulfilled.
"Gain adjustment mode selection" in [Pr. PA08] is "Manual mode (_ _ _ 3)".
"Gain switching selection" in [Pr. PB26] is "Control command from controller is
enabled (_ _ _ 1)".
Switching during driving may cause a shock. Be sure to switch them after the servo
motor or linear servo motor stops.
0.0
[rad/s]
0.0 to
2000.0
Each
Summary of Contents for MR-J4W2
Page 9: ...A 8 MEMO ...
Page 17: ...8 MEMO ...
Page 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 95: ...4 STARTUP 4 20 MEMO ...
Page 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Page 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Page 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Page 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Page 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Page 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Page 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Page 521: ...APPENDIX App 38 ...
Page 537: ...MEMO ...
Page 541: ......







































































