





























7. PARAMETERS
7 - 18
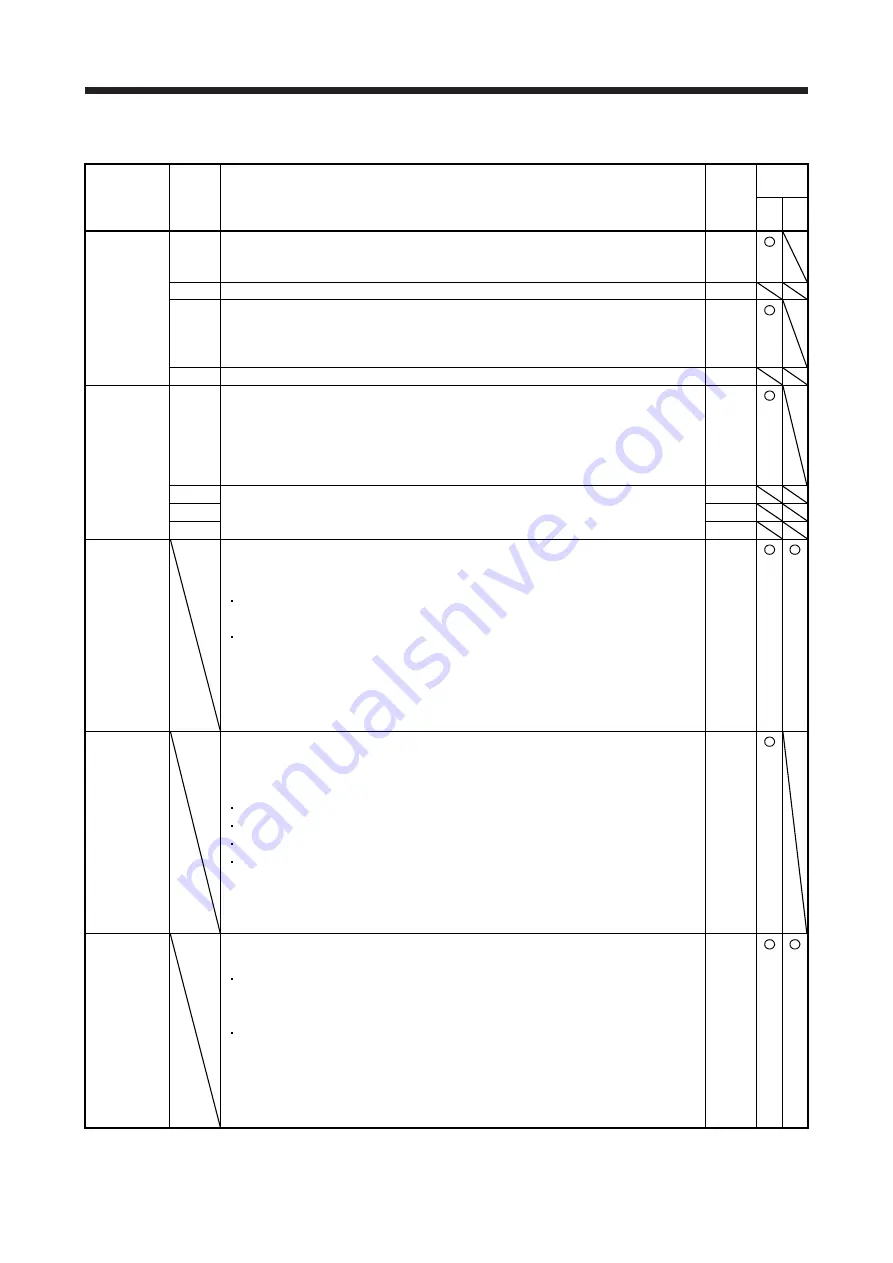
7.2.4 Positioning control parameters ([Pr. PT_ _ ])
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Control
mode
C
P
P
S
PT01
**CTY
Command
mode
selection
_ _ _ x Positioning command method selection
0: Absolute value command method
1: Incremental value command method
0h
_ _ x _ For manufacturer setting
0h
_ x _ _ Position data unit
0: mm
1: inch
3: pulse
3h
x _ _ _ For manufacturer setting
0h
PT03
*FTY
Feeding
function
selection
_ _ _ x Feed length multiplication (STM)
0: × 1
1: × 10
2: × 100
3: × 1000
This digit is disabled when [pulse] is set for "Position data unit" in [Pr. PT01].
0h
_ _ x _ For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
PT07
ZST
Home
position shift
distance
Set a shift distance from the Z-phase pulse detection position in the encoder.
Up to 2
31
can be set with [Pr. PT69].
The unit will be as follows depending on the positioning mode.
In the point table method
The unit can be changed to [µm], 10
-4
[inch], or [pulse] with the setting of [Pr. PT01].
In the indexer method
It will be command unit [pulse]. (A load-side rotation expressed by the number of servo
motor resolution pulses)
Refer to the Function column of [Pr. PA10] for the command unit.
Setting range: 0 to 65535
0
Refer to
Function
column
for unit.
PT09
DCT
Travel
distance after
proximity dog
Set a travel distance after proximity dog at home position return for the count type (front
end detection, Z-phase reference) (Homing method -2, -34) and dog reference.
Up to 2
31
can be set with [Pr. PT71].
The following shows the home position return of the dog reference.
Dog type rear end reference home position return (Homing method -6, -38)
Count type front end reference home position return (Homing method -7, -39)
Dog type front end reference home position return (Homing method -10, -42)
Homing without index pulse (Homing method 19, 20, 21, 22, 23, 24, 27, 28)
The unit can be changed to 10
STM
[
μ
m], 10
(STM-4)
[inch], or [pulse] with the setting of [Pr.
PT01].
Setting range: 0 to 65535
0
Refer to
Function
column
for unit.
PT12
CRP
Rough match
output range
Set a range of the command remaining distance which outputs rough match.
The unit will be as follows depending on the positioning mode.
In the point table method
The unit can be changed to 10
STM
[µm], 10
(STM-4)
[inch], or [pulse] with the setting of [Pr.
PT01].
In the indexer method
It will be command unit [pulse]. (A load-side rotation expressed by the number of servo
motor resolution pulses)
Refer to the Function column of [Pr. PA10] for the command unit.
Setting range: 0 to 65535
0
Refer to
Function
column
for unit.
Summary of Contents for MR-J4-_GF
Page 27: ...2 CC Link IE FIELD NETWORK BASIC PROTOCOL 2 4 MEMO ...
Page 185: ...8 TROUBLESHOOTING AT POWER ON 8 2 MEMO ...
Page 227: ...9 MANUFACTURER FUNCTIONS 9 42 MEMO ...
Page 269: ...10 OBJECT DICTIONARY 10 42 MEMO ...
Page 271: ...MEMO ...






































































