


























6
6
11
5
KEB COMBIVERT F5-M / S
Name: Basis
06.05.04
Section
Page
Date
©
KEB Antriebstechnik, 2002
All Rights reserved
Chapter
Functional Desription
Positioning and Synchronous Control
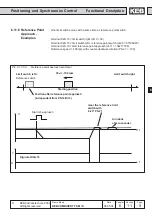
With PS.6 the proportional component of the synchronous position controller is adjusted.
At disabled position controller (value 0) the slave runs speed-synchronous.
PS.6
Function
0
Position controller Off
1...32767
Position control with proportional component
KP Posi / Synch (PS.6)
Limit for posi/synchron
control (PS.9)
Limiting of control difference at the output of the position controller. The position limit
can be adjusted within a range of 0...4000 rpm. For a compatibility to earlier units the
preset value is adjusted to 250 rpm.
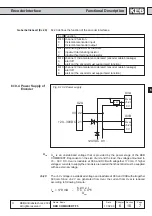
If a gear ratio is to be created between the master and the slave drive, it is done with
the parameters Ec.4/5 or Ec.14/15 (see Chapter 6.10)
Gear ratio
6.11.3 Position Controller
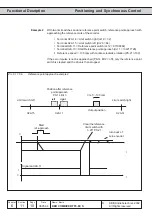
6.11.4 Position Display
Slave position (ru.54)
Master position (ru.56)
Angular difference (ru.58)
Parameter ru.54 displays the actual slave position in increments.
Parameter ru.56 displays the actual master position in increments. Thereby the master
line number is converted onto the slave line number.
The angular difference shows the difference between master and slave position in
increments.
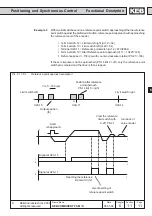
A
B
C
D
CH Parameter
Y-Factor
A
ru54 Slave position
15000 Inc
B
ru56 Master position
15000 Inc
C
ru02 Ramp output display
200,000 rpm
D
ru10 Encoder 2 speed
200,000 rpm
Fig. 6.11.2 Synchronization at activating synchronous run