



























6
10
11
KEB COMBIVERT F5
Name: Basis
17.02.03
6
Section
Page
Date
©
KEB Antriebstechnik, 2002
All rights reserved
Chapter
Functional Description
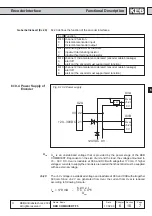
Encoder Interface
Multiple evaluation
(Ec.7, Ec.17)
Through the gear factors it is possible to evaluate incremental encoders, which are
not directly mounted onto the motor shaft. The parameters Ec.4 and Ec.5 adjust the
gear factor for encoder channel 1, Ec.14 and Ec.15 for encoder channel 2. The gear
factors are defined as follows:
Motor speed
Gear factor =
ñññññññññññññññ
Gear speed
Ec.4 gear factor numerator 1
-10000...10000
Gear factor 1 =
ññññññññññññññññññññññññ = ñññññññññññññ
Ec.5 gear factor denominator 1
1...10000
Ec.14 gear factor numerator 2
-10000...10000
Gear factor 2 =
ññññññññññññññññññññññññ = ñññññññññññññ
Ec.15 gear factor denominator 2
1...10000
As additional function it is possible to trigger one of the two numerators with the
function ÑAnalog parameter settingì (see Chapter 6.9.10).
Gear factor
(Ec.4; Ec.5, Ec.14, Ec.15)
Value
Evaluation of the encoder signals
0
Single (for initiator: evaluation of positive edges only) (2
0
)
1
2-fold (for initiator: evaluation of positive and negative edge) (2
1
)
2
4-fold (for incremental encoder) (2
2
) default
3
8-fold (2
3
)
4
16-fold (2
4
)
5
32-fold (2
5
)
6
64-fold (2
6
)
...
13
8192-fold (2
13
)
Encoder track change
(Ec.6, Ec.16)
With Ec.6 bit 0...1 a rotation change for encoder input 1 and with Ec.16 a rotation
change for encoder input 2 can be executed.
With Bit 4 (value 16) a system inverting can be activated. With the system inverting it
is possible to run the motor with positive setting counter-clockwise at the shaft, without
changing the hardware.
Following adjustments are possible:
Value
Function
Direction of rotation
0
no change (default)
1
inverted
2
depends on the sign of the actual frequency (initiator)
3
depends on track B (initiator terminal 4)
4-16
reserved
Encoder system
0
no change (default)
16
inverted
When using other line numbers:
Speed resolution =
Specified speed resolution x 2500
Line number