





























Appendix - 44
MELSEC-A
APPENDICES
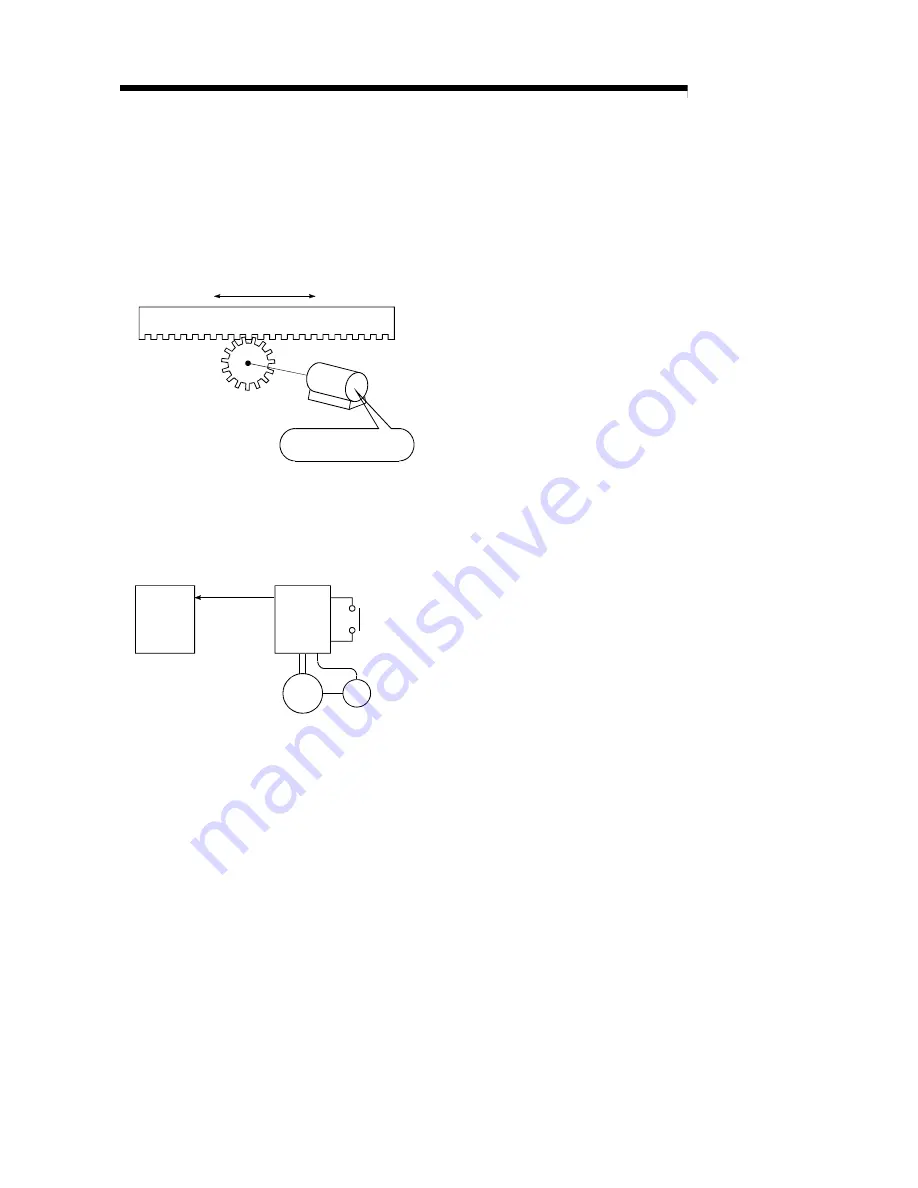
SERVO LOCK
In positioning using a servomotor, working
power is required to hold the machine at the
stop position.
(The position will be lost if the machine is
moved by external power.)
This kind of state is called servo lock or servo
lock torque.
M
Table
Motor holds the position
at the stop position.
SERVO ON
The servo amplifier will not operate if the servo
amplifier is in a normal state and this servo ON
signal is OFF.
AD75
PLG
READY
Servo
amplifier
Servo ON
Motor Encoder
SERVOMOTOR
A motor that rotates true to the command.
Servomotors are highly responsive, and can
carry out frequent high-speed and high-
accuracy starts and stops.
DC and AC types are available, as well as
large-capacity motors. A pulse encoder
accessory for speed detection is common, and
feedback control is often carried out.
SETTING UNIT
This is one setting item of the positioning
reference parameters. The unit to be used is
designated as mm, inch, degree, or pulse.
SKIP FUNCTION
When a SKIP signal is input, the positioning
being executed is interrupted, the motor is
deceleration stopped, and the next positioning
is automatically carried out.
SLAVE AXIS
During interpolation operation, the positioning
data is partially ignored on this side. This axis
is moved by the master axis data.
SPEED CHANGEOVER CONTROL
With this control, positioning is carried out to
the end point of the movement amount while
changing the speed at the speed changeover
point during positioning control.
SPEED CONTROL
Speed control is mainly carried out with the
servomotor. It is an application for grindstone
rotation, welding speed, feedrate, etc. Speed
control differs from position control in that the
current position (address) is not controlled.
SPEED INTEGRAL COMPENSATION
This is one item in the servo parameters of the
positioning data. It is used to raise the
frequency response during speed control, and
improve transient characteristics.
When adjusting the speed loop gain, raising
this value is effective if the overshooting during
acceleration/deceleration remains large.
This compensation is set in ms units.
SPEED LIMIT VALUE
This is the max. speed for positioning. Even if
other data is mistakenly set to a higher speed
than this, the positioning will be carried out at
this speed limit value when it is set in the
parameters. The acceleration time becomes
the time to accelerate from a stopped state to
the speed limit value, and the deceleration
time becomes the time to decelerate from the
speed limit value to a stopped state.
Содержание A1SD75M1
Страница 2: ......
Страница 20: ...A 18 MEMO...
Страница 22: ...MEMO...
Страница 27: ...1 5 MELSEC A 1 PRODUCT OUTLINE MEMO...
Страница 42: ...1 20 MELSEC A 1 PRODUCT OUTLINE MEMO...
Страница 52: ...2 10 MELSEC A 2 SYSTEM CONFIGURATION MEMO...
Страница 111: ...5 21 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 115: ...5 25 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 123: ...5 33 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 127: ...5 37 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 167: ...5 77 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 193: ...5 103 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 276: ...5 186 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 332: ...7 18 MELSEC A 7 MEMORY CONFIGURATION AND DATA PROCESS MEMO...
Страница 334: ...MEMO...
Страница 422: ...9 64 MELSEC A 9 MAIN POSITIONING CONTROL MEMO...
Страница 446: ...10 24 MELSEC A 10 ADVANCED POSITIONING CONTROL MEMO...
Страница 472: ...11 26 MELSEC A 11 MANUAL CONTROL MEMO...
Страница 576: ...12 104 MELSEC A 12 CONTROL AUXILIARY FUNCTIONS MEMO...
Страница 673: ...Appendix 5 MELSEC A APPENDICES Axis address mm inch degree pulse Axis address mm inch degree pulse...
Страница 679: ...Appendix 11 MELSEC A APPENDICES Initial value Axis 1 Axis 2 Axis 3 Remarks 0 0 0 1 1 0 0 0 0 0 300 0 0 0...
Страница 683: ...Appendix 15 MELSEC A APPENDICES Initial value Axis 1 Axis 2 Axis 3 Remarks 0 0 1 0 0 50 80 0 0 980...
Страница 691: ...Appendix 23 MELSEC A APPENDICES Initial value Axis 1 Axis 2 Axis 3 Remarks 0 0 0 0 0 50 80 0 0 0 0 0 980 4000 0...
Страница 745: ......







































































