





























7 - 14
MELSEC-A
7 MEMORY CONFIGURATION AND DATA PROCESS
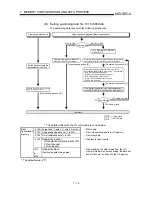
[Servo parameters in the buffer memory and OS memory]
AD75
power ON
Buffer memory,
OS memory
data setting
AD75
initialization
processing
completion
PLC CPU
RUN
Servo parameter
setting from
sequence program
*4
Parameters in
buffer memory
Servo parameters
in OS memory
Communication with servo
amplifier disable *3
Start of communication with servo amplifier enable *3
PLC READY
signal [Y1D]
OFF to ON
Values in flash ROM
Values written with sequence program
Undefined
Values written with sequence program
Undefined
Values in flash ROM
*1
*2
t
*1
*2
(Operation)
(1) Servo parameter transfer made when the AD75 is powered on with the servo amplifier started up
(a) The servo basic parameter "motor capacity" in the flash ROM is not "0"
Timing of starting communication with servo amplifier : At completion of AD75 initialization processing
(
in the above chart)
Transferred servo parameters
: Data stored (saved) in the flash ROM
(b) The servo basic parameter "motor capacity" in the flash ROM is "0"
Timing of starting communication with servo amplifier : When the PLC READY signal [Y1D] turns from
OFF to ON (
in the above chart)
Transferred servo parameters
: Data written from the sequence program
before the PLC READY signal [Y1D] turns ON
(data written in
in the above chart)
(2) Servo parameter transfer made when the servo amplifier starts up after the PLC READY signal [Y1D] has
turned from OFF to ON (
in the above chart)
Timing of starting communication with servo amplifier : At startup of the servo amplifier
Transferred servo parameters
: Data written from the sequence program
before the PLC READY signal [Y1D] turns ON
(data written in
in the above chart)
*1: The servo parameters stored in the flash ROM are transferred to the buffer memory and OS memory by
the AD75 initialization processing performed at power-on.
*2: The servo parameters written to the buffer memory using the sequence program are not reflected on the
OS memory.
When the PLC READY signal (Y1D) turns from OFF to ON, the values set in the buffer memory are
transferred to the OS memory.
*3: Communication with the servo amplifier is not made until the AD75 initialization processing is completed
after power-on.
Communication is started when the communication starting conditions hold after completion of the AD75
initialization processing.
*4: When the servo parameters to be transferred to the servo amplifier have been written to the flash ROM in
advance, setting from the sequence program is not necessary.
Содержание A1SD75M1
Страница 2: ......
Страница 20: ...A 18 MEMO...
Страница 22: ...MEMO...
Страница 27: ...1 5 MELSEC A 1 PRODUCT OUTLINE MEMO...
Страница 42: ...1 20 MELSEC A 1 PRODUCT OUTLINE MEMO...
Страница 52: ...2 10 MELSEC A 2 SYSTEM CONFIGURATION MEMO...
Страница 111: ...5 21 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 115: ...5 25 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 123: ...5 33 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 127: ...5 37 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 167: ...5 77 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 193: ...5 103 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 276: ...5 186 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 332: ...7 18 MELSEC A 7 MEMORY CONFIGURATION AND DATA PROCESS MEMO...
Страница 334: ...MEMO...
Страница 422: ...9 64 MELSEC A 9 MAIN POSITIONING CONTROL MEMO...
Страница 446: ...10 24 MELSEC A 10 ADVANCED POSITIONING CONTROL MEMO...
Страница 472: ...11 26 MELSEC A 11 MANUAL CONTROL MEMO...
Страница 576: ...12 104 MELSEC A 12 CONTROL AUXILIARY FUNCTIONS MEMO...
Страница 673: ...Appendix 5 MELSEC A APPENDICES Axis address mm inch degree pulse Axis address mm inch degree pulse...
Страница 679: ...Appendix 11 MELSEC A APPENDICES Initial value Axis 1 Axis 2 Axis 3 Remarks 0 0 0 1 1 0 0 0 0 0 300 0 0 0...
Страница 683: ...Appendix 15 MELSEC A APPENDICES Initial value Axis 1 Axis 2 Axis 3 Remarks 0 0 1 0 0 50 80 0 0 980...
Страница 691: ...Appendix 23 MELSEC A APPENDICES Initial value Axis 1 Axis 2 Axis 3 Remarks 0 0 0 0 0 50 80 0 0 0 0 0 980 4000 0...
Страница 745: ......







































































