





























8 - 6
MELSEC-A
8 ZERO POINT RETURN CONTROL
Pr.45
Zero point
return method
Operation details
Remarks
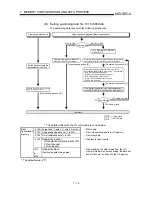
Count method 3) *
1
•
When the zero point is passed from a machine zero point return start until the machine
moves the distance set to "
Pr.52
Setting for the movement amount after near-point dog
ON"
Same as in the "count method 1)".
•
When the zero point is not passed from a machine zero point return start until the machine
moves the distance set to "
Pr.52
Setting for the movement amount after near-point dog
ON"
When the near-point dog turns from OFF to ON, the machine starts deceleration. (The
machine decelerates to "
Pr.49
Creep speed".)
After the machine has moved the distance set to "
Pr.52
Setting for the movement amount
after near-point dog ON", the servomotor is rotated one turn in the opposite direction. (The
zero point is passed.)
The machine moves in the zero point direction again, and after the machine has moved the
distance set to "
Pr.52
Setting for the movement amount after near-point dog ON" from the
position where the near-point dog turned from ON to OFF, the machine stops at the first
zero point*
2
, completing the machine zero point return. (The machine moves at "
Pr.48
Zero point return speed".)
Use this method
in the system
where the "count
method 1)"
cannot be used.
Data setting method
The position reached by JOG operation or manual pulse generator operation in the absolute
position detection system is registered to the AD75 as the zero point.
The current feed value and machine feed value are rewritten to the value set to "
Pr.47
Zero
point address", and the machine zero point return is completed.
*1: The "near-point dog method 2)" and "count method 3)" are the functions added to the AD75 of software version "Q" and
later.
*2: Signal input as the zero point to the AD75 (one-pulse output signal per servomotor revolution <Z phase signal output by
the servo amplifier to the AD75 via the SSCNET cable>) in any of the zero point return methods, near-point dog method,
near-point dog method 2), count method 1), and count method 3).
REMARK
Creep speed
The stopping accuracy is poor when the machine suddenly stops from high
speeds. To improve the machine's stopping accuracy, its must change over to a
low speed before stopping. This speed is set in the " Pr.49 Creep speed".
Содержание A1SD75M1
Страница 2: ......
Страница 20: ...A 18 MEMO...
Страница 22: ...MEMO...
Страница 27: ...1 5 MELSEC A 1 PRODUCT OUTLINE MEMO...
Страница 42: ...1 20 MELSEC A 1 PRODUCT OUTLINE MEMO...
Страница 52: ...2 10 MELSEC A 2 SYSTEM CONFIGURATION MEMO...
Страница 111: ...5 21 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 115: ...5 25 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 123: ...5 33 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 127: ...5 37 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 167: ...5 77 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 193: ...5 103 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 276: ...5 186 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Страница 332: ...7 18 MELSEC A 7 MEMORY CONFIGURATION AND DATA PROCESS MEMO...
Страница 334: ...MEMO...
Страница 422: ...9 64 MELSEC A 9 MAIN POSITIONING CONTROL MEMO...
Страница 446: ...10 24 MELSEC A 10 ADVANCED POSITIONING CONTROL MEMO...
Страница 472: ...11 26 MELSEC A 11 MANUAL CONTROL MEMO...
Страница 576: ...12 104 MELSEC A 12 CONTROL AUXILIARY FUNCTIONS MEMO...
Страница 673: ...Appendix 5 MELSEC A APPENDICES Axis address mm inch degree pulse Axis address mm inch degree pulse...
Страница 679: ...Appendix 11 MELSEC A APPENDICES Initial value Axis 1 Axis 2 Axis 3 Remarks 0 0 0 1 1 0 0 0 0 0 300 0 0 0...
Страница 683: ...Appendix 15 MELSEC A APPENDICES Initial value Axis 1 Axis 2 Axis 3 Remarks 0 0 1 0 0 50 80 0 0 980...
Страница 691: ...Appendix 23 MELSEC A APPENDICES Initial value Axis 1 Axis 2 Axis 3 Remarks 0 0 0 0 0 50 80 0 0 0 0 0 980 4000 0...
Страница 745: ......







































































