



























SD20-G Series
262
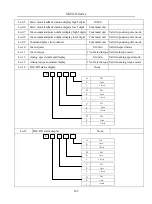
Po303
Position loop feedforward gain
Position
Setting Range
Setting Unit
Mfr’s Value
Effect
0~1000
N/A
0
Immediate effect
Po306
Position filter time constant
Position
Setting Range
Setting Unit
Mfr’s Value
Effect
1~10000
1ms
1
Immediate effect
Position loop gain decides the responsiveness of position control.The bigger setting value is, the higher
gain is, and rigidity is larger. In same frequency instruction pulse, the better following feature of position
instruction is, the lower position error is, and the shorter positioning setting time is, but overlarge setting
value could cause mechanical shack or position overshoot. Internal servo drive uses feedforward
compensation for position control to narrow the positioning time, but the setting value is overlarge, it
may cause mechanical vibration.
If position control instruction changes smoothly, increasing gain can reduce the position following error;
if it does not change smoothly, lower gain can reduce the vibration of system.
B) Speed Loop Gain
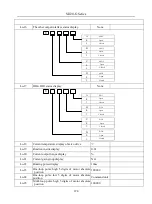
Po101
1
st
Speed loop proportional gain
speed position torque
Setting Range
Setting Unit
Mfr’s Value
Effect
0~30000
0.1Hz
600
Immediate effect
Po102
1
st
Speed loop integral time
speed position torque
Setting Range
Setting Unit
Mfr’s Value
Effect
0~10000
0.1ms
500
Immediate effect
Po103
2
nd
Speed loop proportional gain
speed position torque
Setting Range
Setting Unit
Mfr’s Value
Effect
0~30000
0.1Hz
240
Immediate effect
Po104
2
nd
Speed loop integral time
speed position torque
Setting Range
Setting Unit
Mfr’s Value
Effect
0~30000
0.1ms
1250
Immediate effect
Po105
1
st
Speed loop time constant
speedposition
Setting Range
Setting Unit
Mfr’s Value
Effect
1~20000
0.1ms
1250
Immediate effect
Po106
2
nd
Speed loop filter time constant
speedposition
Setting Range
Setting Unit
Mfr’s Value
Effect
1~20000
0.1ms
—
Immediate effect
Speed loop proportional gain decides the responsiveness of position control. The bigger setting value is,
the higher gain is, but oversize setting could cause mechanical resonance. The frequency in speed mode
Содержание SD20-G Series
Страница 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Страница 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Страница 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Страница 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Страница 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Страница 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































