




























SD20-G Series
100
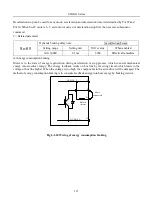
direction is reverse.
Servo drive
K1
K2
FWD
REV
GP
6.1.3 Parameters setting
1) Motor parameters
The parameters of the motor include: rated voltage, rated current, encoder lines, rated rotary speed , numbers of
pole pairs ,phase resistance, inductance, Movement of inertia, back EMF, line voltage ,etc. Please confirm that the
parameter’s setting value is identical to the motor’s parameter to ensure motor normal operation, in case of
burning servo system out. When So-48 is set to 1,the motor’s parameters can be changed .The parameter functions
are as following:
Motor
paramet
ers
Motor parameter setting speed position torque
Function
Code
Function Definition (unit)
Setting range
Function
When enabled
Ho000
Rated voltage (V)
0~30000
rated voltage
Effect Immediate
Ho001
Rated current (0.1A)
0~30000
rated current
Effect Immediate
Ho002
Max rotary speed(r/min)
0~32000
Max rotary speed
Effect Immediate
Ho003
Rated rotary speed (r/min)
0~32000
rated rotary speed
Effect Immediate
Ho004
Pole-pairs (pair)
1~30
pole-pairs
Effect Immediate
Ho005
Phase resistance (10
-3
Ω)
0~65535
phase resistance
Effect Immediate
Ho006
D-axis inductance
(
10
-6
H
)
0~65535
D-axis inductance
Effect Immediate
Ho007
Q-axis inductance
(
10
-6
H
)
0~65535
Q-axis inductance
Effect Immediate
Ho008
Back EMF line voltage
effective value
(
0.1V/1000
r/min
)
0~30000
back EMF line
voltage effective
value
Effect Immediate
Ho012
Motor rotary inertia
(10
-6
Kg•m2)
0
~
2147483647
motor rotary inertia
Effect Immediate
Ho016
Encoder resolution (ppr)
0
~
2147483647
Encoder resolution
Effect Immediate
Ho018
Encoder installation
angle(pulse numbers)
-2147483647
~
+2147483647
Encoder installation
angle(pulse
numbers)
Effect Immediate
Ho121
Over-load sensitivity
1~30000
over-load sensitivity
Effect Immediate
Motor parameters can be set according to the table, in addition, pay attention to the following points in use:
Содержание SD20-G Series
Страница 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Страница 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Страница 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Страница 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Страница 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Страница 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































