


























SD20-G Series
134
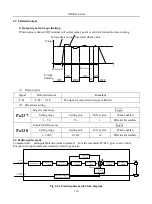
Actual decreasing time T2=Po213 X target torque/rated torque
6.3.3 Speed limiting at torque mode
This function serves to limit the servo motor speed during torque control to protect the machine.
In torque mode, speed limit includes:
1. Internal speed limit 2. Analog speed limit 3. Speed limited by max rotation speed and actual motor max speed.
The third limit method is constantly enabled, and the rest of methods are limited by some conditions.
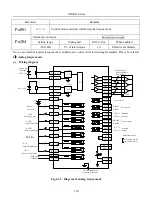
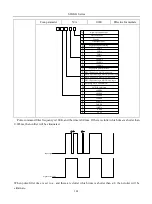
(1) Speed limit during torque control
Po210
Speed Limit During Torque Control
Torque
Setting range
Setting unit
Mfr’s value
When enabled
0~2
N/A
2
Effective Immediate
Parameter
Remarks
Po210=0
Use the value set in Po211 as the speed limit.
Po210=1
Inputs an analog voltage command as the servo motor speed limit value, this is valid for
forward/reverse rotation.
Po210=2
Use the lower value between max rotation speed Po002 and actual motor max rotation
speed as the speed limit.
(
2
)
Related parameter
Po211
Internal speed limit
Torque
Setting range
Setting unit
Mfr’s value
When enabled
0~32000
0.1r/min
20000
Effective Immediate
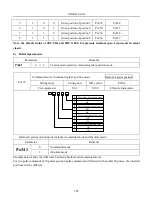
6.3.4 Limiting Torque
The servodrive provides the following three methods for limiting output torque to protect the machine.
1. Internal max torque limit 2. Torque limiting by internal register controlled by terminals 3.Torque limiting by
analog.
Motor speed
Time
Max speed
Speed limit value
Overspeed may lead
to equipment broken.
Speed limit value
Содержание SD20-G Series
Страница 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Страница 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Страница 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Страница 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Страница 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Страница 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































