

























SD20-G Series
136
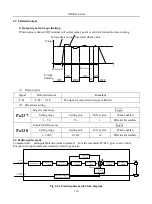
6.3.5 Related output
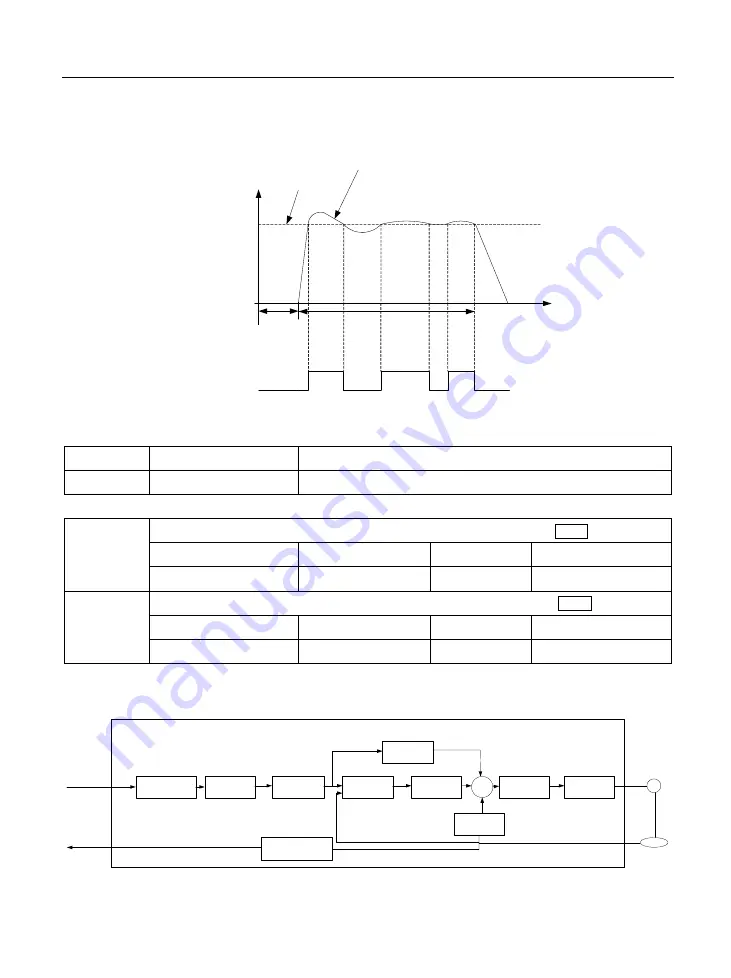
1) Output signal in torque limiting
When torque is limited, DO terminal will output signal, and it is valid for forward/reverse running.
Torque
t
Servo off
Torque
limiting
OFF
ON
OFF
ON
OFF
ON
OFF
Servo on
Torque limit value
Speed feedback value
(1)
Output signal
Signal
Default terminal
Remarkds
T-LT
T-LT+ T-LT-
The signal is output when torque is limited.
(2)
Parameters setting
Po237
Target torque range
Torque
Setting range
Setting unit
Mfr’s value
When enabled
1 ~ 50
1%
2
Effective Immediate
Po238
Torque filter frequency
Torque
Setting range
Setting unit
Mfr’s value
When enabled
1~ 1000
0.1Hz
10
Effective Immediate
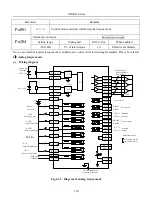
6.4 Position pulse mode
Command unit: distinguishable minimum command, from the command PC/PLC gives to servo drive
Encoder unit: input command, treated by electric gear ratio
Source and
direction of
position command
Electric gear
ratio
Position
command filter
Deviation
counter
Speed feed
forward
Position loop
gain
Speed loop
control
Current loop
control
Speed
calculation
Encoder frequency
division output
X
Position
command input
Frequency
devision output
+
-
+
+
-
Speed feedback
Encoder
M
Motor
Fig 6.4.1 Position pulse mode block diagram
Содержание SD20-G Series
Страница 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Страница 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Страница 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Страница 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Страница 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Страница 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































