




























SD20-G Series
177
PULSE
SIGN
位置指令
屏蔽线连接到机壳上
光耦输出
最大电压
:
30 VDC
最大电流
:
50 mA
伺服驱动器
DI1
DI2
DI3
DI4
DI5
DI6
38
DI7
39
GP
2
18
19
20
21
22
11
26
41
42
9
10
ALM +
7
ALM -
8
PA0 +
36
PA0-
PULS
35
15
PB0 +
44
34
PB0-
33
PZ0+
16
/ PULS
SIGN
PZ0-
12
17
27 /SIGN
D04+
32
OZ
31
DI8+
13
12V
|
24V
D 02+
D03+
D02-
D03-
D01+
43
PL 2
28
PL1
D 01-
编码器分频脉
冲差分输出
GND
AGND
40
HPULS
HSIGN
GND
高速脉冲位
置指令
3
4
HPULS+
6
5
HPULS-
HSIGN+
HSIGN-
24
GND
D04 -
37
CM
+24V 29
CM
30
+24V
DI8-
14
高
速
DI
通
道
集电极开路输出
Servo drive
Encoder
frequency-dividing
pulse
differencial output
Optocoupler output
Max voltage: 30VDC
Max current: 50mA
Open collector
output
Shileded wire connected to case
High-speed
DI channel
Position
command
High-speed
pulse position
command
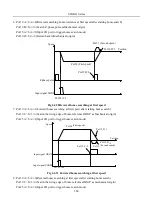
Fig 6.4.39 Full closed loop mode typical wiring diagram
CAUTION
(1)
One of the feedback encoder or pulse input signal must be differential signal
;
(2)
DI1~DI8 terminals are programmable input terminals, and DO1~DO4 terminals are programmable
output terminals. Users can redefine them by the situations.
6.4.13 Gantry Sychron Function
Gantry Sychron: PC/PLC sends pulse commands to two drives at the same time, make the feedback
position pulse signals interact and sampling cross coupling through the encoders of two motors, to realize
the adjustment for speed of the motor.
Содержание SD20-G Series
Страница 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Страница 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Страница 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Страница 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Страница 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Страница 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































