























3. SIGNALS AND WIRING
3 - 43
3.6.6 Torque/position control switching mode
Set " _ _ _ 5" in [Pr. PA01] to switch to the torque/position control switching mode.
(1) LOP (control switching)
Use LOP (Control switching) to switch between the torque control mode and the position control mode
with an external contact. The following shows a relation between LOP and control modes.
(Note)
LOP
Control mode
0
Torque control mode
1
Position control mode
Note. 0: Off
1: On
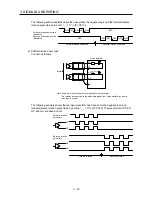
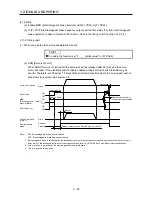
You can switch the control mode in the zero speed status. To ensure safety, switch modes after the
servo motor has stopped. When position control mode is switched to torque control mode, droop pulses
will be reset.
If LOP is switched on/off at the speed higher than the zero speed, the control mode cannot be changed
regardless of the speed. The following shows a switching timing chart.
Zero speed
level
Torque control
mode
Position control
mode
Position control
mode
Servo motor
speed
TC (Analog
torque command)
ZSP (Zero
speed detection)
LOP
(Control switching)
0 V
OFF
(Note)
(Note)
ON
OFF
ON
10 V
Note. When ZSP is not turned on, the control mode is not switched even if LOP is turned
on/off. After LOP is turned on/off, even if ZSP is turned on, the control mode is not
switched.
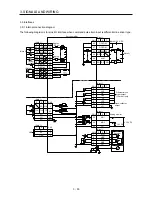
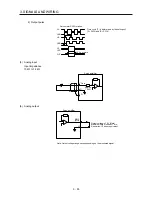
(2) Speed limit in torque control mode
As in section 3.6.3 (3)
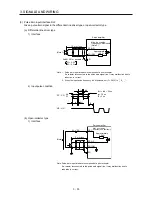
(3) Torque control in torque control mode
As in section 3.6.3 (1)
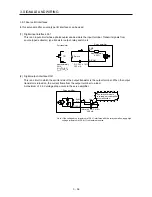
(4) Torque limit in torque control mode
As in section 3.6.3 (2)
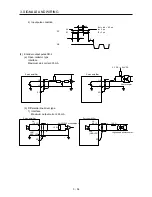
(5) Torque limit in position control mode
As in section 3.6.1 (5)
Summary of Contents for MELSERVO-JE MR-JE-100A
Page 23: ...1 FUNCTIONS AND CONFIGURATION 1 12 MEMO ...
Page 29: ...2 INSTALLATION 2 6 MEMO ...
Page 91: ...3 SIGNALS AND WIRING 3 62 MEMO ...
Page 171: ...5 PARAMETERS 5 44 MEMO ...
Page 195: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 221: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 26 MEMO ...
Page 249: ...8 TROUBLESHOOTING 8 28 MEMO ...
Page 255: ...9 DIMENSIONS 9 6 MEMO ...
Page 263: ...10 CHARACTERISTICS 10 8 MEMO ...
Page 293: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 30 MEMO ...







































































