



























3. SIGNALS AND WIRING
3 - 22
Control
mode
Device
Symbol
Connector
pin No.
Function and application
I/O
division
P S
T
Reset
RES
CN1-19 Turn on RES for more than 50 ms to reset the alarm.
Some alarms cannot be deactivated by RES (Reset). Refer to section 8.1.
Turning RES on in an alarm-free status shuts off the base circuit. The base
circuit is not shut off when " _ _ 1 _ " is set in [Pr. PD30].
This device is not designed to make a stop. Do not turn it on during
operation.
DI-1
Forward rotation
stroke
end
LSP
CN1-43 To start operation, turn on LSP and LSN. Turn it off to bring the motor to a
sudden stop and make it servo-locked.
Setting [Pr. PD30] to " _ _ _ 1" will enable a slow stop.
DI-1
LSN
CN1-44
(Note) Input device
Operation
Reverse rotation
stroke end
LSP
LSN
CCW
direction
CW
direction
1
1
0
1
1
0
0
0
Note. 0: Off
1: On
Set [Pr. PD01] as indicated below to switch on the signals (keep terminals
connected) automatically in the servo amplifier.
Status
[Pr. PD01]
LSP
LSN
_ 4 _ _
Automatic
on
_ 8 _ _
Automatic
on
_ C _ _
Automatic
on
Automatic
on
When LSP or LSN turns off, [AL. 99 Stroke limit warning] occurs, and WNG
(Warning) turns on. When using WNG, enable it by setting [Pr. PD24], [Pr.
PD25] and [Pr. PD28].
External torque
limit selection
TL
Turning off TL will enable [Pr. PA11 Forward torque limit] and [Pr. PA12
Reverse torque limit], and turning on it will enable TLA (Analog torque
limit). For details, refer to section 3.6.1 (5).
DI-1
Internal torque
limit selection
TL1
To select [Pr. PC35 Internal torque limit 2], enable TL1 with [Pr. PD03] to
[Pr. PD20]. For details, refer to section 3.6.1 (5).
DI-1
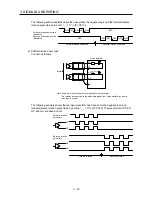
Forward rotation
start
ST1
This is used to start the servo motor.
The following shows the directions.
DI-1
(Note) Input device
ST2
ST1
Servo motor starting direction
0
0
Stop (servo-lock)
0
1
CCW
1
0
CW
1
1
Stop (servo-lock)
Note. 0: Off
1: On
Reverse rotation
start
ST2
If both ST1 and ST2 are switched on or off during operation, the servo
motor will be decelerated to a stop according to the [Pr. PC02] setting and
servo-locked.
When " _ _ _1" is set in [Pr. PC23], the servo motor is not servo-locked
after deceleration to a stop.
Summary of Contents for MELSERVO-JE MR-JE-100A
Page 23: ...1 FUNCTIONS AND CONFIGURATION 1 12 MEMO ...
Page 29: ...2 INSTALLATION 2 6 MEMO ...
Page 91: ...3 SIGNALS AND WIRING 3 62 MEMO ...
Page 171: ...5 PARAMETERS 5 44 MEMO ...
Page 195: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 221: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 26 MEMO ...
Page 249: ...8 TROUBLESHOOTING 8 28 MEMO ...
Page 255: ...9 DIMENSIONS 9 6 MEMO ...
Page 263: ...10 CHARACTERISTICS 10 8 MEMO ...
Page 293: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 30 MEMO ...







































































