











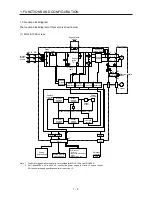
















1. FUNCTIONS AND CONFIGURATION
1 - 4
1.3 Servo amplifier standard specifications
Model: MR-JE-
10A
20A
40A
70A
100A
200A
300A
Rated voltage
3-phase 170 V AC
Output
Rated current
[A]
1.1
1.5
2.8
5.8
6.0
11.0
11.0
Voltage/Frequency
3-phase or 1-phase 200 V AC to 240 V AC, 50
Hz/60 Hz
3-phase 200 V AC to 240 V AC, 50
Hz/60 Hz
Rated current
[A]
0.9
1.5
2.6
3.8
5.0
10.5
14.0
Permissible voltage
fluctuation
3-phase or 1-phase 170 V AC to 264 V AC
3-phase 170 V AC to 264 V AC
Permissible frequency
fluctuation
Within ±5%
Power supply capacity
[kVA]
Refer to section 10.2.
Power supply
input
Inrush current
[A]
Refer to section 10.5.
Voltage
24 V DC ± 10%
Interface
power supply Current capacity
[A]
(Note 1) 0.3
Control method
Sine-wave PWM control, current control method
Dynamic brake
Built-in
Communication function
USB: Connection to a personal computer or others (MR Configurator2-compatible)
Encoder output pulses
Compatible (A/B/Z-phase pulse)
Analog monitor
Two channels
Max. input pulse
frequency
4 Mpulses/s (for differential receiver) (Note 3), 200 kpulses/s (for open collector)
Positioning feedback
pulse
Encoder resolution (resolution per servo motor revolution): 131072 pulses/rev
Command pulse
multiplying factor
Electronic gear A:1 to 16777215, B:1 to 16777215, 1/10 < A/B < 4000
In-position range
setting
0 pulse to ±65535 pulses (command pulse unit)
Error excessive
±3 revolutions
Position
control mode
Torque limit
Set by parameter setting or external analog input (0 V DC to +10 V DC/maximum torque)
Speed control range
Analog speed command 1: 2000, internal speed command 1: 5000
Analog speed
command input
0 to ±10 V DC/rated speed (The speed at 10 V is changeable with [Pr. PC12].)
Speed fluctuation ratio
±0.01% or less (load fluctuation 0% to 100%), 0% (power fluctuation ±10%), ±0.2% or less
(ambient temperature 25 °C ± 10 °C) when using analog speed command
Speed control
mode
Torque limit
Set by parameter setting or external analog input (0 V DC to +10 V DC/maximum torque)
Analog torque
command input
0 V DC to ±8 V DC/maximum torque (input impedance 10 k
ȍ
to 12 k
ȍ
)
Torque
control mode
Speed limit
Set by parameter setting or external analog input (0 V DC to 10 V DC/rated speed)
Protective functions
Overcurrent shut-off, regenerative overvoltage shut-off, overload shut-off (electronic thermal),
servo motor overheat protection, encoder error protection, regenerative error protection,
undervoltage protection, instantaneous power failure protection, overspeed protection, and
error excessive protection
CE marking
LVD: EN 61800-5-1
EMC: EN 61800-3
MD: EN ISO 13849-1, EN 61800-5-2, EN 62061
Compliance
to global
standards
UL standard
UL 508C
Structure (IP rating)
Natural cooling, open (IP20)
Force cooling, open
(IP20)
Close mounting (Note 2)
Possible
Operation
0
˚
C to 55
˚
C (non-freezing)
Ambient
temperature Storage
-20
˚
C to 65
˚
C (non-freezing)
Operation
Ambient
humidity
Storage
90 %RH or less (non-condensing)
Ambience
Indoors (no direct sunlight),
free from corrosive gas, flammable gas, oil mist, dust, and dirt
Altitude
1000 m or less above sea level
Environment
Vibration resistance
5.9 m/s
2
, at 10 Hz to 55 Hz (directions of X, Y and Z axes)
Mass
[kg]
0.8
1.5
2.1
Note 1. 0.3 A is the value applicable when all I/O signals are used. The current capacity can be decreased by reducing the number of
I/O points.
2. When closely mounting the servo amplifier of 3.5 kW or less, operate them at the ambient temperatures of 0
˚
C to 45
˚
C or at
75% or smaller effective load ratio.
3. 1 Mpulse/s or lower commands are supported in the initial setting. When inputting commands over 1 Mpulse/s and 4 Mpulses/
s or lower, change the setting in [Pr. PA13].
Summary of Contents for MELSERVO-JE MR-JE-100A
Page 23: ...1 FUNCTIONS AND CONFIGURATION 1 12 MEMO ...
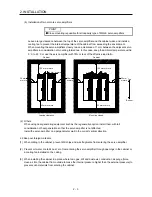
Page 29: ...2 INSTALLATION 2 6 MEMO ...
Page 91: ...3 SIGNALS AND WIRING 3 62 MEMO ...
Page 171: ...5 PARAMETERS 5 44 MEMO ...
Page 195: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 221: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 26 MEMO ...
Page 249: ...8 TROUBLESHOOTING 8 28 MEMO ...
Page 255: ...9 DIMENSIONS 9 6 MEMO ...
Page 263: ...10 CHARACTERISTICS 10 8 MEMO ...
Page 293: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 30 MEMO ...







































































