





























CHAPTER 4 PARAMETER
4-24
Control Gain and Filter Setting Parameters
4
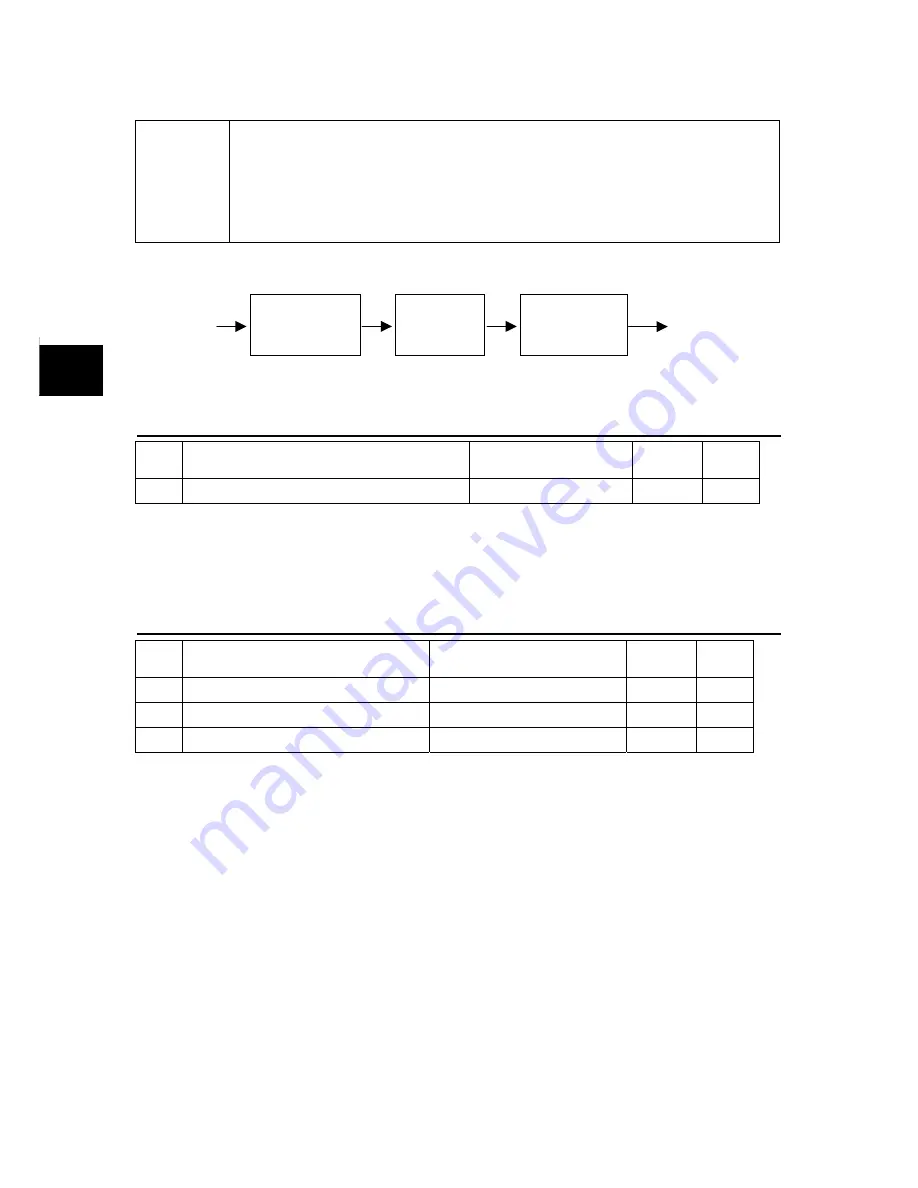
Command
pulse
smoothing
function
The parameter is enabled under position control.
If the function is enabled, smoothing is added to the position command every 2 [ms]
intervals.
A larger setting at low command pulse frequencies or large electronic gear ratios can
reduce the torque ripple caused by fluctuation of the command pulse.
While the setting can be changed at any time, the new setting is reflected when both
the position command and filter accumulation pulse are "0".
Function configuration block
•
For details of tuning, refer to "CHAPTER 5 SERVO ADJUSTMENT."
PA1_54 Position command response time constant
No. Name
Setting
range
Default
value
Change
54 Position command response time constant
0.00 [ms] to 250.00 [ms]
***
Always
Specify the following response characteristics to commands. A smaller setting improves the response
characteristics.
Automatic adjustment is made inside the amplifier if PA1_13 (tuning mode selection) is 0 (auto tuning)
or 1 (semi-auto tuning).
PA1_55 to 57 Response to disturbance settings
No. Name
Setting
range
Default
value
Change
55 Position loop gain 1
1 [rad/s] to 2000 [rad/s]
***
Always
56 Speed loop gain 1
1 [Hz] to 2000 [Hz]
***
Always
57
Speed loop integration time constant 1 0.5 [ms] to 1000.0 [ms]
***
Always
Position loop gain 1: Position disturbance response setting. A larger setting improves the response
characteristics.
Speed loop gain 1: Speed disturbance setting. A larger setting improves the response characteristics.
Speed loop integration time constant 1: Integration time constant setting of speed response. A smaller
setting improves the response.
Too much a response characteristic may cause vibration or noise.
Automatic adjustment is made inside the amplifier if PA1_13 (tuning mode selection) is other than 2
(manual tuning).
Command
Command pulse
smoothing
function
Control
section
Moving
average
S-curve time
Low-pass filter
(for s-curve)
time constant
Summary of Contents for ALPHA 5 RYT-SX
Page 1: ...MEHT301a FUJI SERVO SYSTEM USER S MANUAL RYT SX type ...
Page 19: ...0 1 CHAPTER 0 INTRODUCTION 0 ...
Page 34: ...CHAPTER 0 INTRODUCTION 0 16 Combination between Servomotor and Servo Amplifier 0 ...
Page 35: ...1 1 CHAPTER 1 INSTALLATION 1 ...
Page 45: ...2 1 CHAPTER 2 WIRING 2 ...
Page 142: ...CHAPTER 2 WIRING 2 98 Description of I O Signals 2 ...
Page 143: ...3 1 CHAPTER 3 OPERATION 3 ...
Page 197: ...4 1 CHAPTER 4 PARAMETER 4 ...
Page 296: ...CHAPTER 4 PARAMETER 4 100 Output Terminal Function Setting Parameters 4 ...
Page 297: ...5 1 CHAPTER 5 SERVO ADJUSTMENT 5 ...
Page 329: ...6 1 CHAPTER 6 KEYPAD 6 ...
Page 371: ...7 1 CHAPTER 7 MAINTENANCE AND INSPECTION 7 ...
Page 389: ...8 1 CHAPTER 8 SPECIFICATIONS 8 ...
Page 414: ...CHAPTER 8 SPECIFICATIONS 8 26 Dimensions of Servo Amplifier 8 ...
Page 415: ...9 1 CHAPTER 9 CHARACTERISTICS 9 ...
Page 425: ...10 1 CHAPTER 10 PERIPHERAL EQUIPMENT 10 ...
Page 463: ...11 1 CHAPTER 11 ABSOLUTE POSITION SYSTEM 11 ...
Page 473: ...12 1 CHAPTER 12 POSITIONING DATA 12 ...
Page 482: ...CHAPTER 12 POSITIONING DATA 12 10 Response Time 12 ...
Page 483: ...13 1 CHAPTER 13 PC LOADER 13 ...
Page 513: ...14 1 CHAPTER 14 APPENDIXES 14 ...
Page 545: ...CHAPTER 14 APPENDIXES Service Network 14 33 14 14 8 Service Network ...
Page 546: ...CHAPTER 14 APPENDIXES 14 34 Service Network 14 ...







































































