





























373
Stopping
Section 6-21
Feedback control is not performed while outputting 0 V and while waiting for
the brake to turn ON after outputting 0 V. It is thus possible that the axis will be
rotating. (Feedback control is performed while waiting for the brake to turn ON
for a servo unlock command, and thus the axis will not rotate.)
6-21-1 Changes Made to the Driver Alarm Input Stop Method
The method used to stop the servomotor when an error occurs at the servo
driver and a driver alarm input error (error code: 003C) is generated, has been
changed in the following way. The change is effective for models with -E9 at
the end of the lot number, and for models with lot numbers 991118 or later.
Specifications before
Change
After the driver alarm input signal is received, brake output and RUN com-
mand output are turned OFF with the following timing. Brake output and RUN
Servo Unlock
Upon input.
The servo is unlocked upon input.
During program operation, the servo will be unlocked for the
specified axis and the other axes in the same task will be
decelerated to a stop.
Emergency Stop
Upon input.
Each axis is stopped immediately upon input.
There are two methods for stopping: accumulated-pulse stop
and servo-off stop. The selection is made in the system
parameters.
CCW, CW Limit Inputs
Upon input.
Each axis is stopped immediately upon input.
There are two methods for stopping: accumulated-pulse stop
and servo-unlock stop. The selection is made in the system
parameters.
Software Limit ON
When a software limit is
exceeded.
Each axis is decelerated to a stop when a software limit is
exceeded.
During interpolation operations, axis operation is stopped after
moving from the interpolation locus.
Other errors
Refer to
SECTION 12 Troubleshooting.
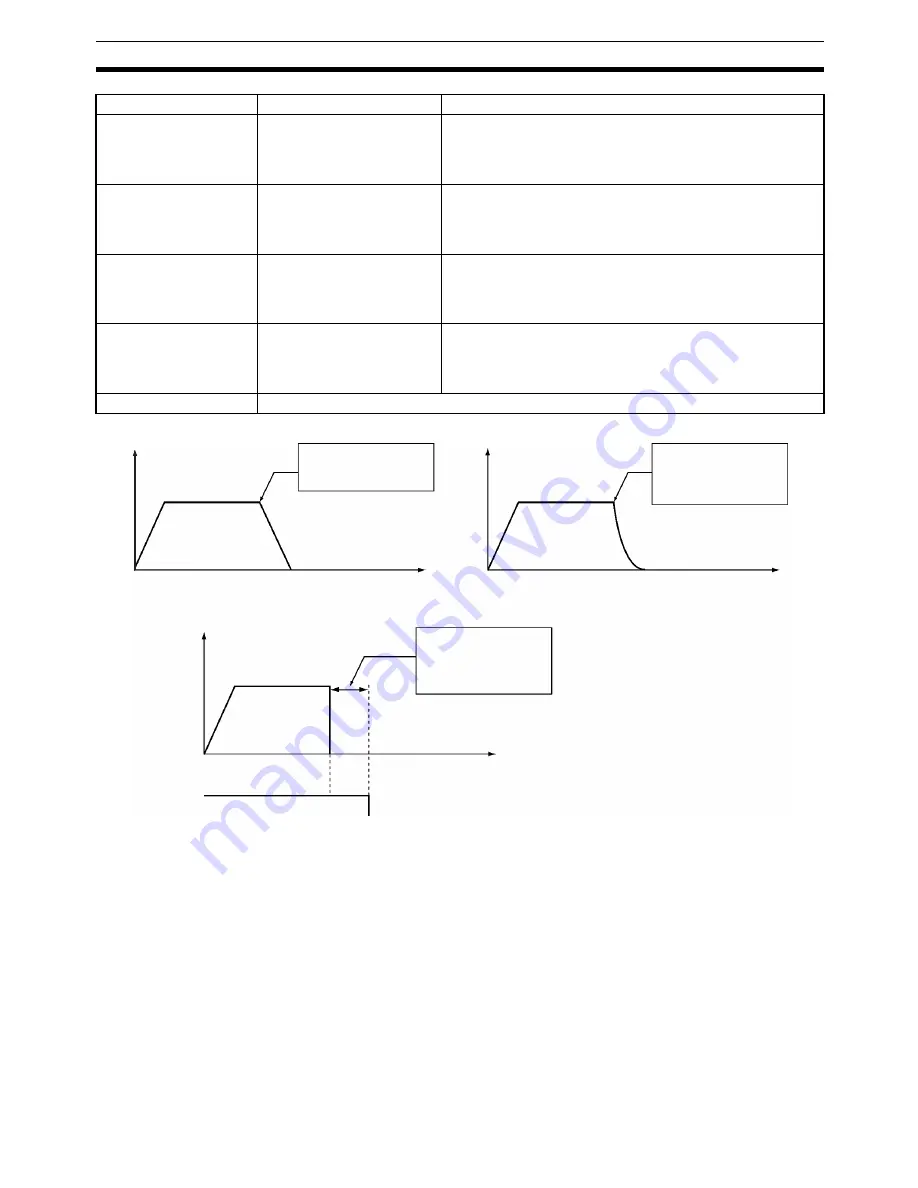
Method
Activation timing
Remarks
Speed
Deceleration stop
Decelerates to a stop at the
ratio of the maximum feed
rate and the deceleration
time.
Speed
Accumulated-pulse stop
Deletes the accumulated
pulses in the error counter
and stops operation.
Time
Time
Servo-unlock
Outputs 0 V for 5 s, and
then turns OFF the
operation command
output to the servo driver.
Speed
Time
Operation
command
output to
servo driver
Содержание CS1W-MC221 -
Страница 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Страница 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Страница 3: ...iv ...
Страница 5: ...vi ...
Страница 11: ...xii ...
Страница 15: ...xvi ...
Страница 19: ...xx ...
Страница 27: ...xxviii Conformance to EC Directives 6 ...
Страница 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Страница 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Страница 227: ...200 Command Area Section 3 6 ...
Страница 351: ...324 Interface Specifics Section 5 4 ...
Страница 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Страница 575: ...548 Error Log Section 12 6 ...
Страница 589: ...562 Performance Appendix A ...
Страница 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Страница 683: ...656 Origin Search Patterns Appendix F ...
Страница 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































