





























100
Overview of Version 1 Upgrades
Section 1-12
1-12-2-2
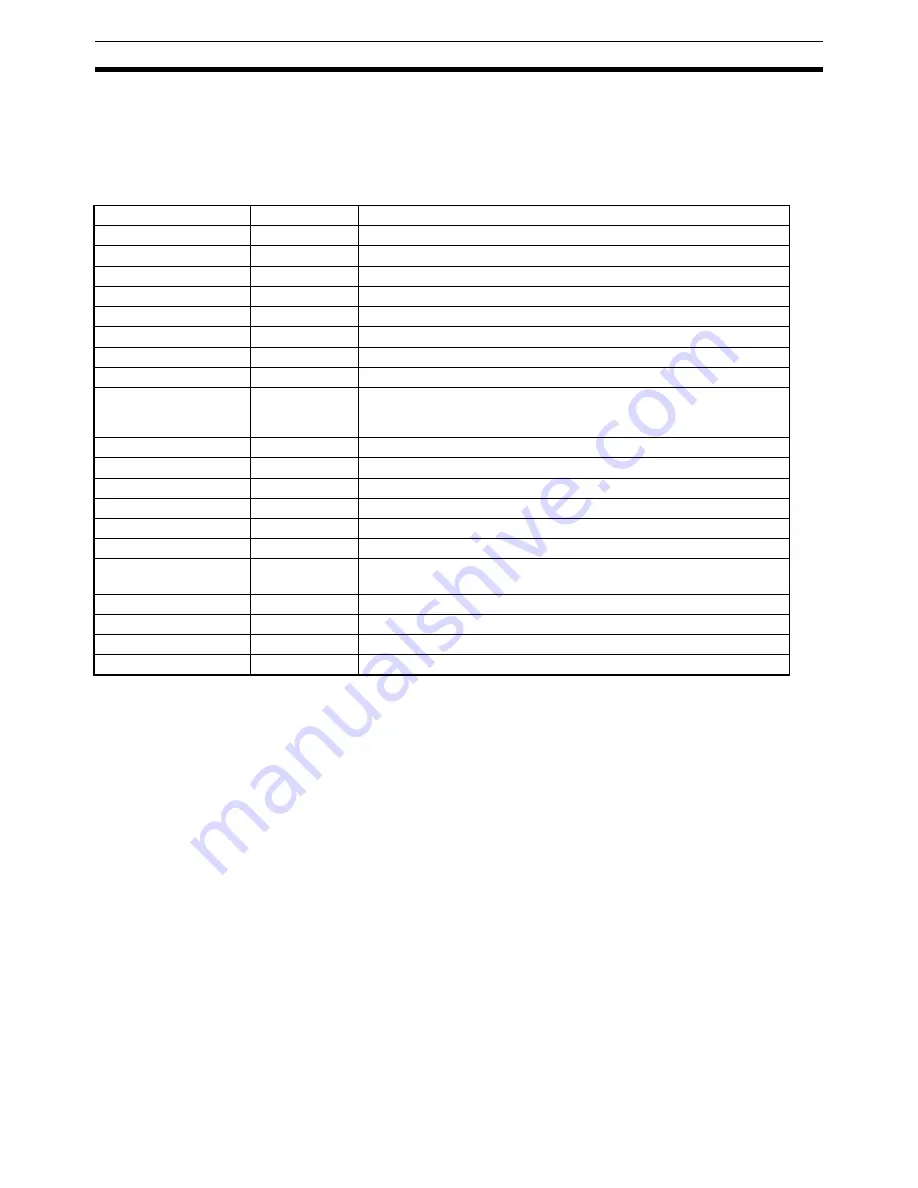
Input Axis and Integrated Axis Operation
Position slippage may occur when certain functions are used with an input axis and integrated axis. These
cases are listed in the following table.
The meanings of the symbols in the
Use
column are as follows:
Yes: Can be used. Conditional: Can be used under certain conditions. No: Cannot be used.
1-12-2-3
Performance
1.
How long is the processing time in the servo cycle?
Differences in calculation time in the servo cycle. (Is there any effect on performance compared to the
existing [G01/02] calculations?)
G01 = Electronic gear < Electronic cam < G01 (two) < Electronic gear (two) < Electronic cam (two) <
G02
The startup time is designed so that it does not depend on the calculation time in the servo cycle.
There is no problem in terms of the load because two electronic cams or electronic gears execute
faster than one G02.
There is, however, a possibility of an overload occurring if the G-code command for the register func-
tion is executed at the same time as G02. Therefore, do not allow the register function and G02 to be
used together.
2.
How much time is required for command interpretation when an electronic cam uses 100 points?
With two points, it is faster than linear interpolation, but with 100 points it takes approximately 20 ms.
3.
With an electronic cam, approximately how long is the period while waiting for a trigger?
It is approximately twice as long as the time from one servo cycle to the next (i.e., approx. 2 to 4 ms).
4.
How is the output axis PV handled during synchronized control, during an interruption, or at completion?
The PV is controlled (held) in the normal way.
Axis operation
Use
Remarks
G00
Yes
---
G01
Yes
---
G02
Yes
---
G03
Yes
---
G26
Yes
---
G27
Yes
---
G28
No
Correct inputs cannot be obtained.
G30
Yes
---
G31
Conditional
Correct inputs cannot be obtained if the position command value is
used and the deceleration time to the end point is less than 2 ms. If the
time is 2 ms or greater or if there is an encoder, there is no problem.
G32
Yes
---
Electronic gear function
Yes
---
Electronic cam function
Yes
---
Origin search
No
Correct inputs cannot be obtained.
Reference origin return
Yes
---
JOG
Yes
---
Error counter reset
Conditional
Correct inputs cannot be obtained for position command values. There
is no problem with the encoder.
Forced origin
Conditional
Position displays change, but inputs do not change.
ABS origin setting
No
Correct inputs cannot be obtained.
MPG
Yes
---
Servo-lock
Conditional
Axis movement is input by the wiring check.
Содержание CS1W-MC221 -
Страница 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Страница 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Страница 3: ...iv ...
Страница 5: ...vi ...
Страница 11: ...xii ...
Страница 15: ...xvi ...
Страница 19: ...xx ...
Страница 27: ...xxviii Conformance to EC Directives 6 ...
Страница 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Страница 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Страница 227: ...200 Command Area Section 3 6 ...
Страница 351: ...324 Interface Specifics Section 5 4 ...
Страница 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Страница 575: ...548 Error Log Section 12 6 ...
Страница 589: ...562 Performance Appendix A ...
Страница 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Страница 683: ...656 Origin Search Patterns Appendix F ...
Страница 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































