





























177
System Parameters
Section 3-3
Note
When using models with the previous specifications, take appropriate coun-
termeasures against dropping in the vertical axis.
Specifications after Change
Brake output and RUN command output are turned OFF when the driver
alarm input signal is received. (Operation when other errors that result in an
emergency stop are generated will be the same as for previous models.)
Encoder ABS/INC
This parameter specifies whether the encoder being used is an absolute or
incremental encoder. Set the parameter to “Absolute encoder for U or W
series” when using an absolute encoder with a U-series Servo Driver.
Encoder Resolution
This parameter sets the encoder resolution. Encoder resolution is the number
of pulses (encoder frequency dividing ratio) that can be output per encoder
revolution. It can be set from 1 to 65,535 and the default setting is 1,000 pr.
Make sure the resolution satisfies the following condition.
Upper limit of max. motor speed [r/min]
≤
500 [kp/s] x 60
÷
encoder resolution [p/r]
If the resolution does not satisfy the above condition, reduce the resolution
from parameters at the servo driver or reduce the maximum number of motor
revolutions.
When using a G-series Servo Driver, set the encoder resolution to the same
value as Pn44 (Encoder Divider Numerator Setting), and set Pn45 (Encoder
Divider Denominator Setting) to 0.
Encoder Ratio
This parameters specifies the encoder ratio (4, 2 or 1). The default setting is a
ratio of 4.
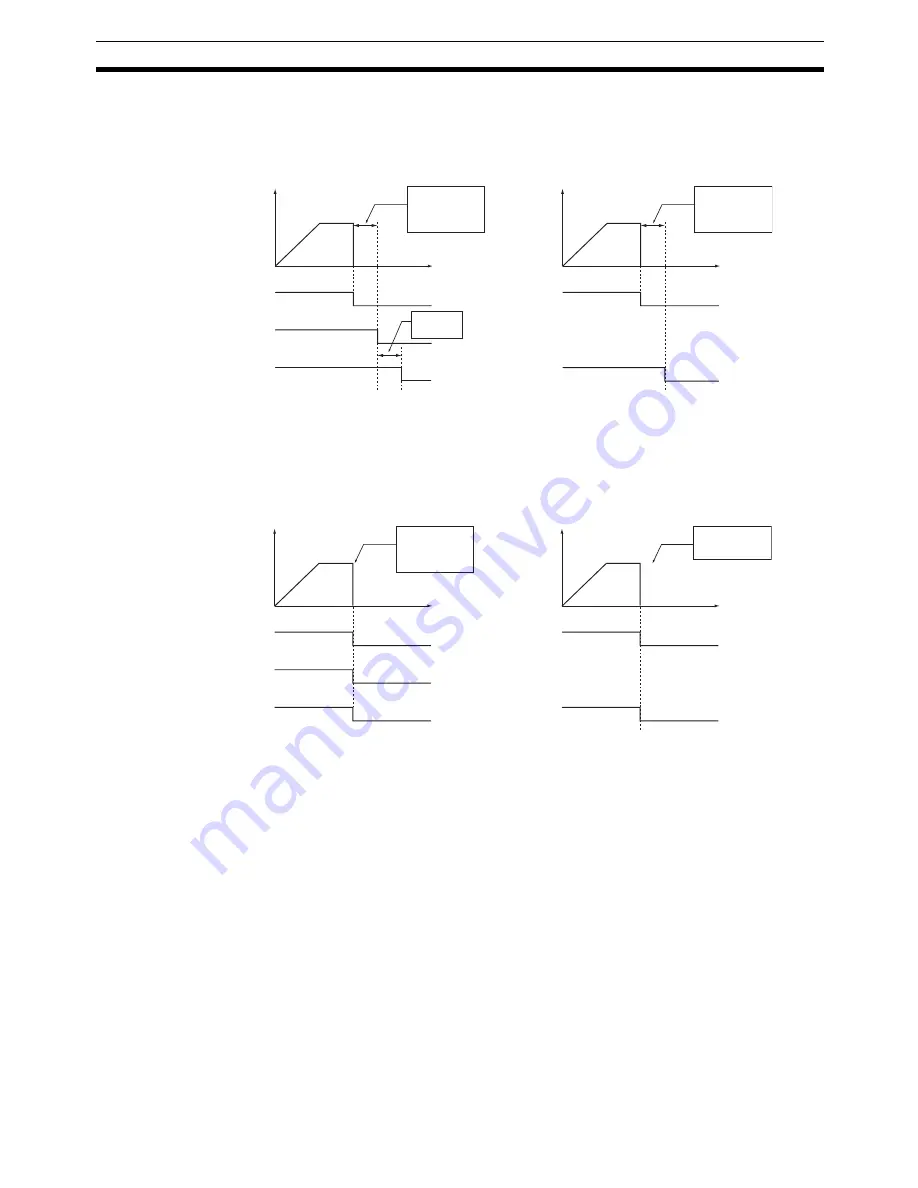
With brake output enabled:
With brake output disabled:
Voltage output
Time
If the CW (or
CCW) limit input
signal is received,
0 V is output for
0.5 s.
CW limit input
Brake output
RUN command output
Waits the
duration of the
brake ON time.
Voltage output
Time
If the CW (or
CCW) limit input
signal is received,
0 V is output for
0.5 s.
CW limit input
RUN command output
With brake output enabled:
With brake output disabled:
Voltage output
Time
Brake output and RUN
command output turn
OFF when the driver
alarm input signal is
received.
Driver alarm input
Brake output
RUN command output
Voltage output
Time
RUN command output
turns OFF when the
driver alarm input signal
is received.
RUN command output
Driver alarm input
Содержание CS1W-MC221 -
Страница 1: ...Motion Control Units Cat No W359 E1 04 CS1W MC221 V1 421 V1 OPERATION MANUAL ...
Страница 2: ...CS1W MC221 V1 421 V1 Motion Control Units Operation Manual Revised February 2008 ...
Страница 3: ...iv ...
Страница 5: ...vi ...
Страница 11: ...xii ...
Страница 15: ...xvi ...
Страница 19: ...xx ...
Страница 27: ...xxviii Conformance to EC Directives 6 ...
Страница 133: ...106 Installation Section 2 2 2 2 4 Dimensions CS1W MC421 CS1W MC221 ...
Страница 173: ...146 Connecting Peripheral Devices Section 2 7 ...
Страница 227: ...200 Command Area Section 3 6 ...
Страница 351: ...324 Interface Specifics Section 5 4 ...
Страница 513: ...486 Absolute Encoder Interface Specifications Section 9 7 ...
Страница 575: ...548 Error Log Section 12 6 ...
Страница 589: ...562 Performance Appendix A ...
Страница 655: ...628 Control Bit Flag Timing Charts Appendix E ...
Страница 683: ...656 Origin Search Patterns Appendix F ...
Страница 685: ...658 Encoder Divider Rate and Rotation Speed for OMRON Servo Drivers Appendix G ...







































































