





























399
PARAMETER
2
P
ARAM
ETE
R
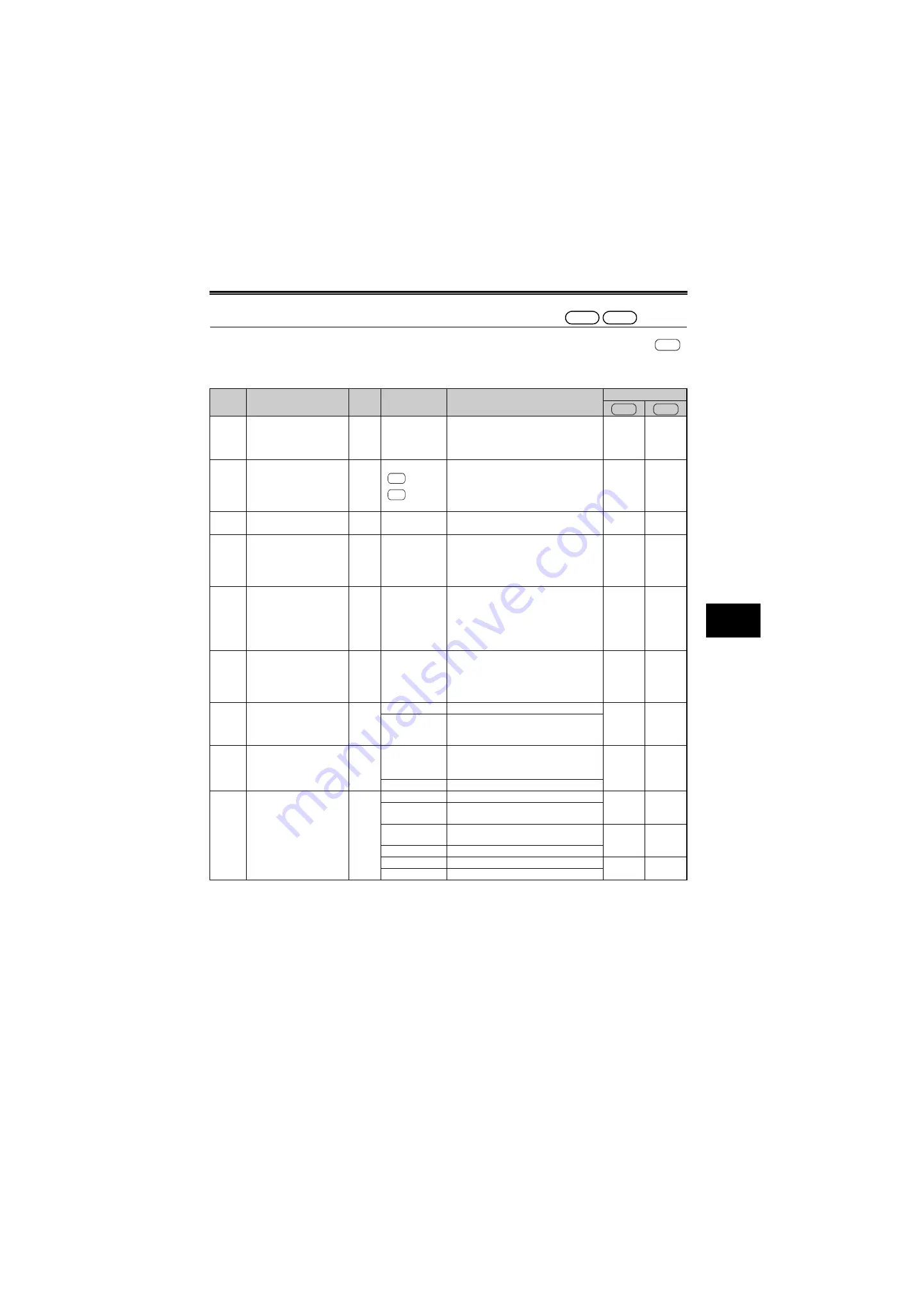
2.20.3 Brake sequence function [Pr. 278 to 283, 284*, 285*, 292]
(A700)
This function is used to output from the inverter the
mechanical brake operation timing signal in vertical lift and
other applications. This function prevents the load from
dropping with gravity at a start due to the operation timing
error of the mechanical brake or an overcurrent alarm from
occurring at a stop, ensuring secure operation.
A700 E700
(*[
Pr. 284, 285
] are not available for
.)
E700
[Pr.]
Name
Initial
Value
Setting Range
Description
Available Inverters
278
Brake opening frequency
3Hz
0 to 30Hz
Set to the rated slip frequency of the motor +
about 1.0Hz.
Setting is enabled only when [
Pr. 278
]
≤
[
Pr.
282
].
{
{
279
Brake opening current
130%
0 to 220%
0 to 200%
Generally, set this parameter to about 50 to
90%. If the setting is too low, the load is
liable to drop due to gravity at start.
Suppose that the rated inverter current is
100%.
{
{
280
Brake opening current
detection time
0.3s
0 to 2s
Generally, set this parameter to about 0.1 to
0.3s.
{
{
281
Brake operation time at a
start
0.3s
0 to 5s
Set the mechanical delay time until the
brake is loosened when [
Pr. 292
=7].
Set the mechanical delay time until the
brake is lo about 0.1 to 0.2s when
[
Pr. 292 = 8
].
{
{
282
Brake operation frequency
6Hz
0 to 30Hz
Set the frequency to activate the mechanical
brake by turning OFF the brake opening
request signal (BOF). Generally, set this
parameter to the [
Pr. 278
] s 3 to 4Hz.
Setting is enabled only when [
Pr. 282
]
≥
[
Pr.
278
].
{
{
283
Brake operation time at stop
0.3s
0 to 5s
Set the mechanical delay time until the
brake is 0.1s when [
Pr. 292 = 7
].
Set the mechanical delay time until the
brake is 0.2 to 0.3s when [
Pr. 292 =
8
].
{
{
284
Deceleration detection
function selection
0
0
Deceleration is not detected.
{
—
1
If deceleration is not normal during
deceleration operation, the inverter alarm is
provided.
285
Overspeed detection
frequency
*
9999
0 to 30Hz
If (detected frequency) - (output frequency)
≥
Pr. 285
during encoder feedback control,
the inverter fault (E.MBI) is provided.
{
—
9999
Overspeed is not detected.
292
Automatic acceleration/
deceleration
0
0
Normal operation mode
{
{
1, 11
Shortest acceleration/deceleration mode
(refer to page 242)
3
Optimum acceleration/deceleration mode
(refer to page 243)
{
—
5, 6
Elevator mode (refer to page 249)
7
Brake sequence mode 1
{
{
8
Brake sequence mode 2
A700
E700
A700
E700
* When performing vector control with the FR-A7AP or FR-A7AL, this parameter changes to speed deviation excess detection
frequency. (For details, refer to page 294.)
Содержание FR-A700 Series
Страница 245: ...279 2 PARAMETER PARAMETER MEMO ...
Страница 440: ...474 PARAMETER MEMO ...
Страница 522: ...556 SELECTION MEMO ...







































































