




























287
2
P
ARAM
ETE
R
PARAMETER
(2) Easy gain tuning execution procedure (load
inertia ratio automatic estimation)
[
Pr. 819 = 1, Pr. 818, 820, 821, 880
]
Easy gain tuning (load inertia ratio automatic
estimation) is valid only in the speed control or position
control mode under vector control.
It is invalid under torque control, V/F control, Advanced
magnetic flux vector control and Real sensorless vector
control.
1) Set the response level using [
Pr. 818 Easy gain tuning
responsiveness setting
]. Refer to the diagram below
and set the response level.
Increasing the value will improve trackability to the
command, but too high value will generate vibration.
The relationship between the setting and response
level are shown below.
2) Set [
Pr. 819 Easy gain tuning responsiveness setting = 1
]
(load inertia ratio automatic estimation ).
Each control gain (refer to the table below) is
automatically set from the load inertia ratio
estimated during acceleration/deceleration
operation and the [
Pr. 818 Easy gain tuning response
level setting
] value.
[
Pr. 880 Load inertia ratio
] is used as the initial value
of the load inertia ratio for tuning. Estimated value is
set in [
Pr. 880
] during tuning. Even when [
Pr. 819
]
setting is returned to 0 after tuning, tuning results set
in each parameter remain unchanged.
The load inertia ratio may not be estimated well, e.g.
it takes a long time for estimation, if the following
conditions are not satisfied.
• Time taken for acceleration/deceleration to
reach 1500r/min should be 5s or less.
• Speed should be 150r/min or more.
• Acceleration/deceleration torque is 10% or
more of the rated torque.
• Abrupt disturbance is not applied during
acceleration/deceleration.
• Load inertia ratio is about 30 times or less.
• No gear backlash nor belt looseness is found.
3) Press
or
to estimate the load inertia
ratio or calculate gain any time.
(The operation command for external operation is
the STF or STR signal.)
(3) Easy gain tuning execution procedure (load
inertia ratio manual input)
[
Pr. 819 = 2, Pr. 818, 820, 821, 880
]
Easy gain tuning (load inertia ratio manual input) is valid
only in the speed control mode under Real sensorless
vector control or in the speed control or position control
mode under vector control.
1) Set the load inertia ratio to the motor in [
Pr. 880 Load
inertia ratio
].
2) Set [
Pr. 819 Easy gain tuning responsiveness setting = 2
]
(easy gain tuning is valid). When the value is set,
each control gain (refer to the table below) is
automatically set according to the gain calculation.
Even when [
Pr. 819
] setting is returned to 0 after
tuning, tuning results set in each parameter remain
unchanged.
Operation is performed in a gain adjusted status
from the next operation.
3) Perform a test run and set the response level in [
Pr.
818 Easy gain tuning response level setting
]. Increasing
the value will improve trackability to the command,
but too high value will generate vibration. When ([
Pr.
77 Parameter write selection = 2
] (parameter write
enabled during operation) is set, response level
adjustment can be made during operation.
[
Pr. 818
] setting
Guideline of
mechanical resonance
frequency (Hz)
Response level
8
10 12 15 18 22 28 34 42 52 64 79
98 122 150
1
2
3 4
5
6 7
8
9 10 11 12
13 14 15
Slow
response
Fast
response
Medium
response
Large conveyor
Arm robot
Precision
machine tool
General machine tool,
conveyor
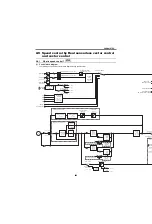
Relationship between easy gain tuning and gain adjustment parameter
[
Pr. 819 Easy Gain Tuning Selection
] Setting
0
1
2
[
Pr. 880 Load inertia ratio
]
Manual
input
a) Inertia estimation result (RAM) by easy gain tuning is
displayed.
b) Set the value in the following cases:
• Every hour after power-ON
• When a value other than 1 is set in [
Pr. 819
].
• When vector control is changed to other control
(V/F control etc.) using [
Pr. 800
].
c) Write is enabled only during a stop (manual input)
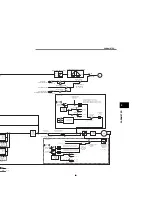
Manual input
[
Pr. 820 Speed control P gain 1
]
[
Pr. 821 Speed control integral time 1
]
[
Pr. 828 Model speed control gain
]
[
Pr. 422 Position loop gain
]
Manual
input
a)Tuning result (RAM) is displayed.
b) Set the value in the following cases:
• Every hour after power-ON
• When a value other than 1 is set in [
Pr. 819
].
• When vector control is changed to other control
(V/F control etc.) using [
Pr. 800
].
c) Write (manual input) disabled
a) Gain is calculated when 2 is set
in [
Pr. 819
] and the result is set
in the parameter.
b) When the value is read, the
tuning result (parameter setting
value) is displayed.
c) Write (manual input) disabled
Содержание FR-A700 Series
Страница 245: ...279 2 PARAMETER PARAMETER MEMO ...
Страница 440: ...474 PARAMETER MEMO ...
Страница 522: ...556 SELECTION MEMO ...







































































