





























317
PARAMETER
2
P
ARAM
ETE
R
2.11.6 Setting of positioning adjustment parameter [Pr. 426, 427]
(A700)
(1) In-position width [Pr. 426]
The Y36 signal acts as an in-position signal. When
the number of droop pulses has fallen below the
setting value, the in-position signal (Y36) turns ON.
For the Y36 signal, assign the function by setting 36
(positive logic) or 136 (negative logic) in any of [
Pr.
190 to 196 Output terminal function selection
] .
(2) Excessive level error [Pr. 427]
When droop pulses exceed the value set in [
Pr. 427
],
position error becomes large, and a fault (E.OD) is
displayed to stop the inverter. When you decrease
the position loop gain [
Pr. 422 Position loop gain
]
setting, increase the error excessive level setting.
Also decrease the setting when you want to detect an
error slightly earlier under large load.
When [
Pr. 427
= 9999], position error large (E.OD)
does not occur regardless of droop pulses.
2.11.7 Gain adjustment [Pr. 422, 423, 425]
(A700)
Easy gain tuning is available as an easy tuning method.
Refer to page 286
for easy gain tuning.
If easy gain tuning does not produce any effect, make fine
adjustment by using the following parameters.
Set [
Pr. 819 Easy gain tuning
= 0] before setting the
parameters below.
(1) Position loop gain [Pr. 422]
Make adjustment when any of unusual vibration,
noise and overcurrent of the motor/machine occurs.
Increasing the setting improves response for the
position command and also improves servo rigidity at
a stop, but oppositely makes an overshoot and
vibration more liable to occur.
Normally set this parameter within the range about 5
to 50.
(2) Position feed forward gain [Pr. 423]
This function is designed to cancel a delay caused by
the droop pulses of the deviation counter.
When a tracking delay for command pulses poses a
problem, increase the setting gradually and use this
parameter within the range where an overshoot or
vibration will not occur.
This function has no effects on servo rigidity at a
stop.
Normally set this parameter to 0.
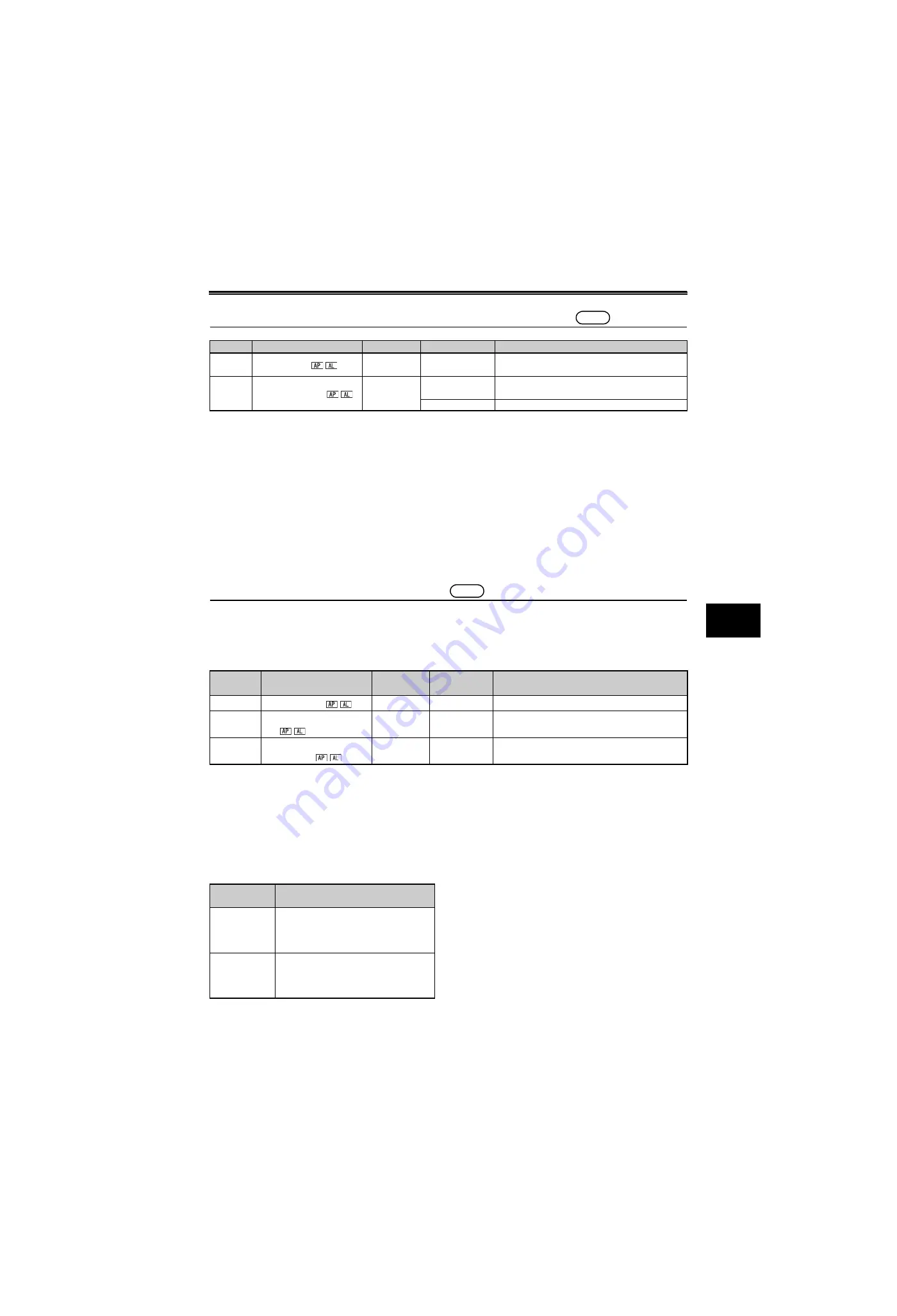
[Pr. ]
Name
Initial Value
Setting Range
Description
426
In-position width
100 pulses
0 to 32767 pulses
*
When the number of droop pulses has fallen below the
setting value, the in-position signal (Y36) turns ON.
427
Excessive level error
40
0 to 400
A position error excessive (E.OD) occurs when the
number of droop pulses exceeds the setting.
9999
Function invalid
* When the operation panel (FR-DU07) is used, the maximum setting is 9999. When a parameter unit is used, up to the maximum
value within the setting range can be set.
A700
A700
[Pr. ]
Name
Initial Value
Setting
Range
Description
422
Position loop gain
25s
-1
0 to 150s
-1
Set the gain of the position loop.
423
Position feed forward
gain
0%
0 to 100%
Function to cancel a delay caused by the droop pulses
of the deviation counter.
425
Position feed forward
command filter
0s
0 to 5s
Enters the primary delay filter in response to the feed
forward command.
Phenomenon/
Condition
Adjustment Method
Slow response
Increase the [
Pr. 422
] setting by 3s
-1
until just
before an overshoot or instable behavior
such as stop-time vibration occurs, and set
about 0.8 to 0.9 of that value.
Overshoot, stop-
time vibration or
other instable
behavior occurs.
Decrease the [
Pr. 422
] setting by 3s
-1
until just
before an overshoot or instable behavior
such as stop-time vibration does not occur,
and set about 0.8 to 0.9 of that value.
Содержание FR-A700 Series
Страница 245: ...279 2 PARAMETER PARAMETER MEMO ...
Страница 440: ...474 PARAMETER MEMO ...
Страница 522: ...556 SELECTION MEMO ...







































































