





























-
39
-
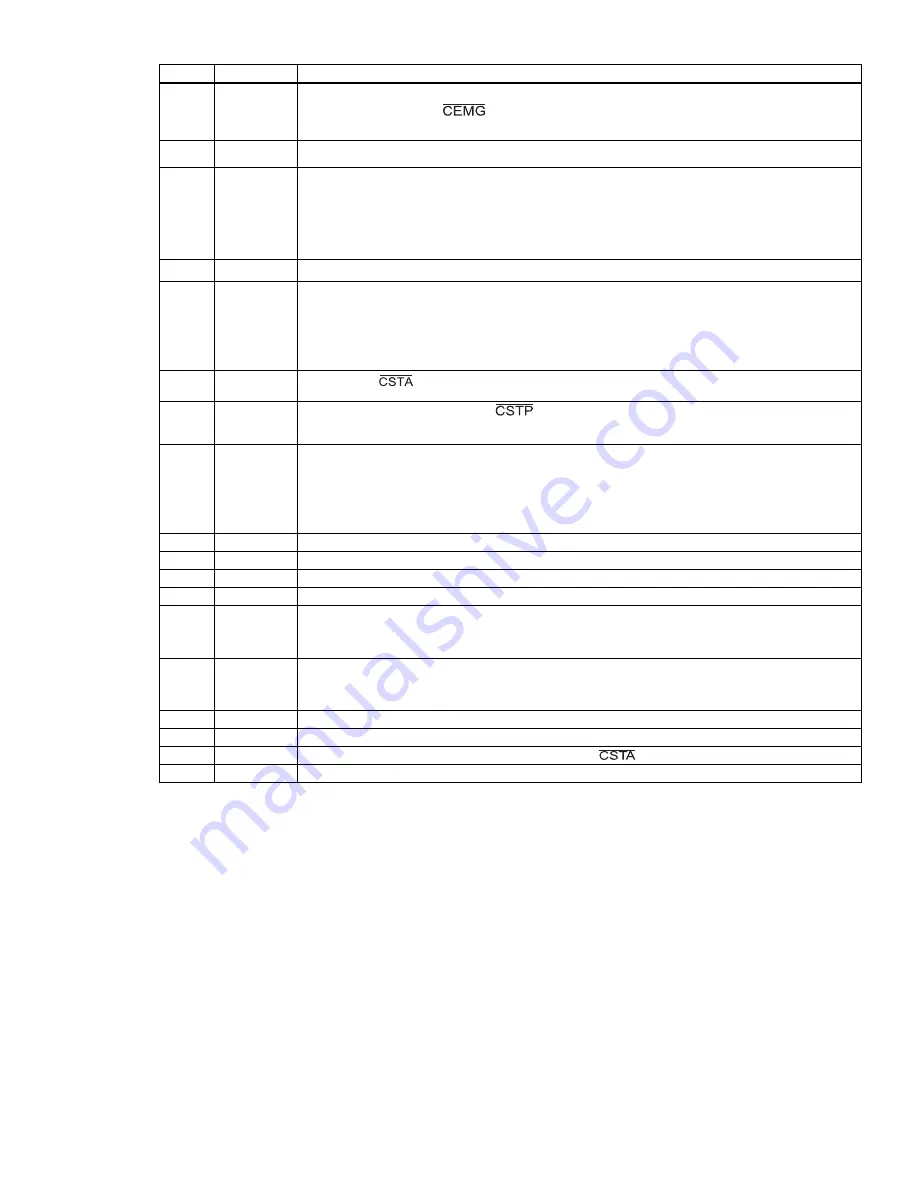
Bits
Bit
name
Description
10
EROE
1:
Automatically
outputs
an
ERC
signal
when
the
axis
is
stopped
immediately
by
a
+EL,
-EL,
ALM,
or
input
signal.
However,
the
ERC
signal
is
not
output
when
a
deceleration
stop
occurs
on
the
axis.
11
EROR
1:
Automatically
output
the
ERC
signal
when
the
axis
completes
a
zero
return.
12
to
14
EPW0
to
2 Specify
the
pulse
width
of
the
ERC
output
signal.
(CLK=19.6608MHz)
000:
12
µ
sec
100:
13
msec
001:
102
µ
sec
101:
52
msec
010:
409
µ
sec
110:
104
msec
011:
1.6
msec
111:
Level
output
15
ERCL
Specify
the
ERC
signal
output
logic.
(0:
Negative
logic.
1:
Positive
logic.)
16
to
17
ETW0
to
1 Specify
the
ERC
signal
OFF
timer
time.
(CLK=19.6608MHz)
00:
0
µ
sec
01:
12
µ
sec
10:
1.6
msec
11:
104
msec
18
STAM
Specify
the
signal
input
type.
(0:
Level
trigger.
1:
Edge
trigger.)
19
STPM
Specify
a
stop
method
using
input.
(0:
Immediate
stop.
1:
Deceleration
stop.)
Note
2
20
to
21
FTM
0
to
1 Select
features
of
+EL,
-EL,
SD,
ORG,
ALM,
and
INP
filters.
00:
Pulse
length
shorter
than
3.2
µ
sec
are
ignored.
(When
CLK=19.6608MHz)
01:
Pulse
length
shorter
than
25
µ
sec
are
ignored.
(When
CLK=19.6608MHz)
10:
Pulse
length
shorter
than
200
msec
are
ignored.
(When
CLK=19.6608MHz)
11:
Pulse
length
shorter
than
1.6
msec
are
ignored.
(When
CLK=19.6608MHz)
22
INPL
Specify
the
INP
signal
input
logic.
(0:
Negative
logic.
1:
Positive
logic.)
23
LTCL
Specify
the
operation
edge
for
the
LTC
signal.
(0:
Falling.
1:
Rising)
24
PCSL
Specify
the
PCS
signal
input
logic.
(0:
Negative
logic.
1:
Positive
logic.)
25
DRL
Specify
the
+DR,
-DR
signal
input
logic.
(0:
Negative
logic.
1:
Positive
logic.)
26
FLTR
1:
Apply
a
filter
to
the
+EL,
-EL,
SD,
ORG,
ALM,
or
INP
inputs.
When
a
filter
is
applied,
signal
pulses
shorter
than
the
pulse
length
specified
by
FTM0
to
1
are
ignored.
27
DRF
1:
Apply
a
filter
on
the
+DR,
-DR,
or
PE
inputs.
When
a
filter
is
applied,
signals
pulses
shorter
than
32
msec
(CLK=19.6608MHz)
are
ignored.
28
DTMF
1:
Turn
OFF
the
direction
change
timer
(0.2
msec)
function.
29
INTM
1:
Mask
an
INT
output.
(Changes
the
interrupt
circuit.)
30
PCSM
1:
Only
allow
the
PCS
input
on
the
local
axis
signal.
31
PMSK
1:
Masks
output
pulses
Note1:
When
a
deceleration
stop
(ELM
=
1)
has
been
specified
to
occur
when
the
EL
input
turns
ON,
the
axis
will
start
the
deceleration
when
the
EL
input
is
turned
ON.
Therefore,
the
axis
will
stop
by
passing
over
the
EL
position.
In
this
case,
be
careful
to
avoid
collisions
of
mechanical
systems.
Note
2:
When
deceleration
stop
is
selected,
this
bit
remains
ON
until
the
PCL
decelerates
and
stops.
The
PCL
determines
whether
it
has
stopped
normally
or
not
according
to
the
stop
timing.
Therefore,
if
an
error
stop
signal
is
input
while
decelerating
with
high
speed
positioning,
the
PCL
may
determine
whether
the
stop
was
normal.
In
this
case,
the
PCL
will
continue
to
the
next
operation
without
canceling
the
data
stored
in
the
pre-registers.
If
a
constant
error
stop
signal
is
input,
the
PCL
will
not
continue
to
the
next
operation
and
it
will
stop
with
an
error.
Summary of Contents for PCL6113
Page 1: ...User s Manual For PCL6113 6123 6143 Pulse Control LSI Nippon Pulse Motor Co Ltd...
Page 11: ...5 3 Terminal Assignment Diagram 3 1 PCL6113 3 2 PCL6123...
Page 20: ...14 5 Block Diagram...
Page 115: ...109 11 Stop timing by error...
Page 116: ...110 13 External Dimensions 13 1 PCL6113...
Page 117: ...111 13 2 PCL6123...
Page 118: ...112 13 3 PCL6143...







































































