





























-
51
-
9-3-1.
Continuous
operation
using
a
pulsar
input
(MOD:
01h)
This
mode
allows
continuous
operation
using
a
pulsar
input.
When
PA/PB
signals
are
input
after
writing
a
start
command,
the
LSI
will
output
pulses
to
the
OUT
terminal.
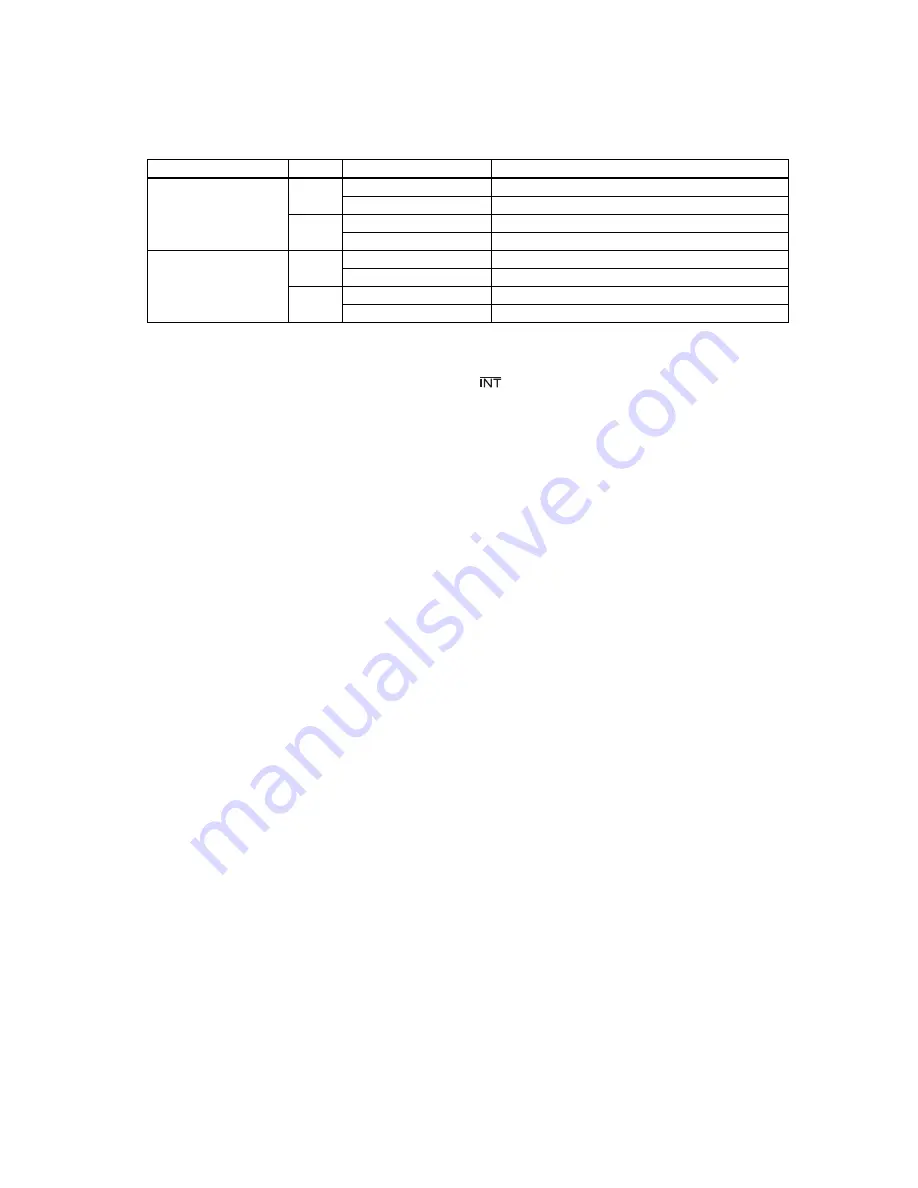
The
feed
direction
depends
on
PA/PB
signal
input
method
and
the
value
set
in
PDIR.
PA/PB
input
method PDIR
Feed
direction
PA/PB
input
Positive
direction
When
the
PA
phase
leads
the
PB
phase.
0
Negative
direction
When
the
PB
phase
leads
the
PA
phase.
Positive
direction
When
the
PB
phase
leads
the
PA
phase.
90
˚ phase difference
signal
(1x,
2x,
and
4x)
1
Negative
direction
When
the
PA
phase
leads
the
PB
phase.
Positive
direction
PA
input
rising
edge.
0
Negative
direction
PB
input
rising
edge.
Positive
direction
PB
input
rising
edge.
2
pulse
input
of
positive
and
negative
pulses
1
Negative
direction
PA
input
rising
edge.
The
PCL
stops
operation
when
the
EL
signal
in
the
current
feed
direction
is
turned
ON.
But
the
PCL
can
be
operated
in
the
opposite
direction
without
writing
a
restart
command.
When
stopped
by
the
EL
input,
no
error
interrupt
(
output)
will
occur.
To
release
the
operation
mode,
write
an
immediate
stop
command
(49h).
9-3-2.
Positioning
operations
using
a
pulsar
input
(MOD:
51h)
The
PCL
positioning
is
synchronized
with
the
pulsar
input
by
using
the
PRMV
setting
as
incremental
position
data.
When
starting
an
axis,
the
PCL
loads
the
RMV
register
value
into
the
positioning
counter.
The
feed
direction
is
determined
by
the
sign
in
the
PRMV
register.
When
PA/PB
signals
are
input,
the
LSI
outputs
pulses
and
the
positioning
counter
counts
down.
When
the
value
in
the
positioning
counter
reaches
zero,
movement
on
the
axis
will
stop
and
another
PA/
PB
input
will
be
ignored.
Set
the
PRMV
register
value
to
zero
and
start
the
positioning
operation.
The
LSI
will
stop
movement
on
the
axis
immediately,
without
outputting
any
command
pulses.
Summary of Contents for PCL6113
Page 1: ...User s Manual For PCL6113 6123 6143 Pulse Control LSI Nippon Pulse Motor Co Ltd...
Page 11: ...5 3 Terminal Assignment Diagram 3 1 PCL6113 3 2 PCL6123...
Page 20: ...14 5 Block Diagram...
Page 115: ...109 11 Stop timing by error...
Page 116: ...110 13 External Dimensions 13 1 PCL6113...
Page 117: ...111 13 2 PCL6123...
Page 118: ...112 13 3 PCL6143...







































































