





























37
Elmark Automatyka S.A.
ul. Niemcewicza 76, 05-075 Warszawa, tel. (+48) 22 773 79 37; [email protected]; www.elmark.com.pl
NIP: 5252072585; KRS: 0000803828, Sąd Rejonowy dla M-St. Warszawy, XIV Wydział Gosp. KRS; Kapitał Zakładowy 525.000 zł, w pełni opłacony
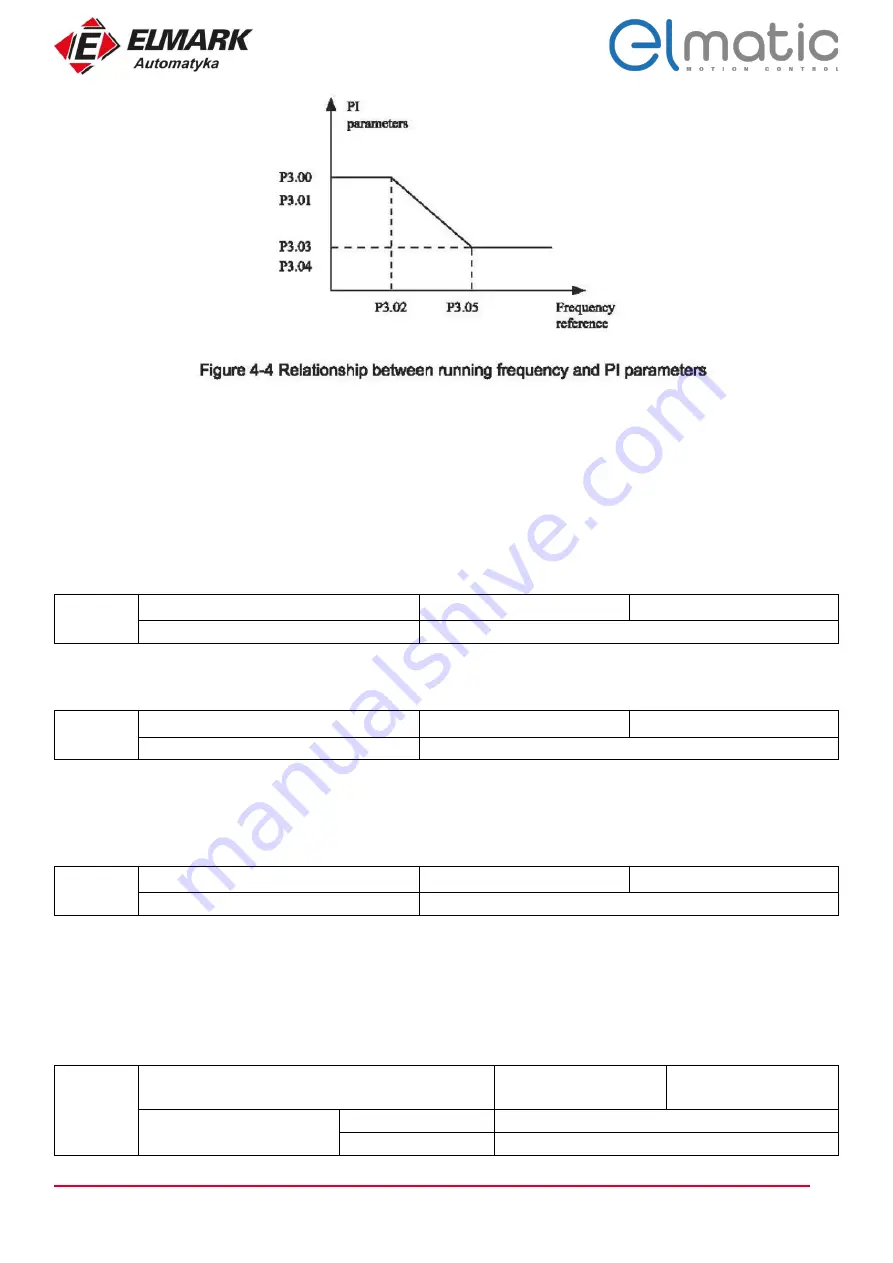
The speed dynamic response characteristics in vector control can be adjusted by setting the proportional gain and integral time
of the speed regulator.
To achieve a faster system response, increase the proportional gain and reduce the integral time. Be aware that this may lead to
system oscillation.
The recommended adjustment method is as follows:
If the factory setting cannot meet the requirements, make proper adjustment. Increase the proportional gain first to ensure that
the system does not oscillate, and then reduce the integral time to ensure that the system has quick response and small overshoot.
Note: Improper Pl parameter setting may cause too large speed overshoot, and overvoltage fault may even occur when the
overshoot drops.
P3.06
Vector control slip gain
Default
100%
Setting Range
50%~200%
For SFVC, it is used to adjust speed stability accuracy of the motor. When the motor with load runs at a very low speed, increase
the value of this parameter; when the motor with load runs at a very large speed, decrease the value of this parameter.
P3.07
Time constant od speed loop filter
Default
0.000s
Setting Range
0.000s~0.100s
In the vector control mode, the output of the speed loop regulator is torque current reference. This parameter is used to filter the
torque references. It need not be adjusted generally and can be increased in the case of large speed fluctuation. In the case of
motor oscillation, decrease the value of this parameter properly. If the value of this parameter is small, the output torque of the
AC drive may fluctuate greatly, but the response is quick.
P3.08
Vector control over-excitation gain
Default
64
Setting Range
0~200
During deceleration of the AC drive, over-excitation control can restrain rise of the bus voltage to avoid the overvoltage fault. The
larger the over-excitation gain is, the better the restraining effect is. Increase the over-excitation gain if the AC drive is liable to
overvoltage error during deceleration. Too large over-excitation gain, however, may lead to an increase in output current.
Therefore, set this parameter to a proper value in actual applications.
Set the over-excitation gain to 0 in applications of small inertia (the bus voltage will not rise during deceleration) or where there
is a braking resistor.
P3.09
Torque upper limit source in
speed control mode
Default
0
Setting Range
0
P3.10
1
FIV
Summary of Contents for elmatic ED2000
Page 1: ......







































































