





























Drive profile
61
3 E
therC
3-5
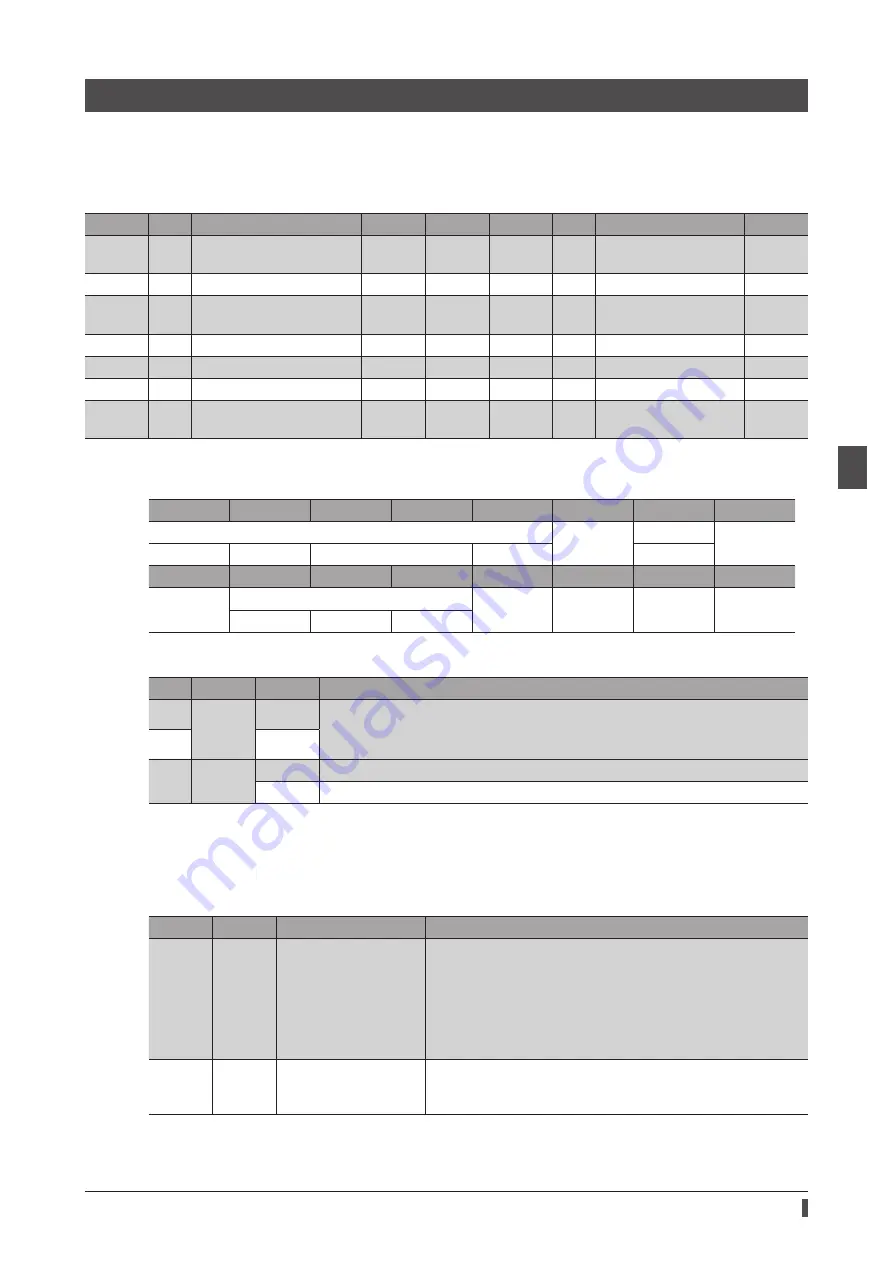
Cyclic synchronous velocity mode (CSV)
In the Cyclic synchronous velocity mode, a path generation (profile generation) is performed by the EtherCAT master.
By cyclic synchronous communication, when the Target velocity (60FFh) is sent from the EtherCAT master to the
driver, the driver performs speed controls.
Related objects
Index
Sub
Name
Type
Access
PDO
Save
Range
Update
6040h
00h
Controlword
U16
RW
RxPDO
−
0000h to FFFFh
(Initial value: 0000h)
A
6041h
00h
Statusword
U16
RO
TxPDO
−
−
−
6060h
00h
Modes of operation
INT8
RW
RxPDO
0 (Initial value), 1, 3, 6, 8,
9 (
B
6061h
00h
Modes of operation display
INT8
RO
TxPDO
−
−
−
606Bh
00h
Velocity demand value [Hz]
INT32
RO
TxPDO
−
−
−
606Ch
00h
Velocity actual value [Hz]
INT32
RO
TxPDO
−
−
−
60FFh
00h
Target velocity [Hz]
INT32
RW
RxPDO
−
−4,000,000 to 4,000,000
(Initial value: 0)
A
Controlword of Cyclic synchronous velocity mode
Bit 15
Bit 14
Bit 13
Bit 12
Bit 11
Bit 10
Bit 9
Bit 8
Manufacturer specific (ms)
Reserved
oms
Halt
−
−
Type
−
−
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Fault reset
Operation mode specific (oms)
Enable
operation
Quick stop
Enable
voltage
Switch on
−
−
−
Details of Controlword
Bit
Name
Value
Description
13
Type
−
Selects the operation mode of the Cyclic synchronous velocity mode. The operation
mode changed is updated immediately. For details, refer to "Operation mode of
Cyclic synchronous velocity mode"
12
−
8
Halt
0
Operation is allowed.
1
Stops the operation. The stopping method is "Immediate stop."
For Bit 7 and Bit 3 to Bit 0, refer to “State transition of drive state machine” on p.46.
Operation mode of Cyclic synchronous velocity mode
The operation mode of the Cyclic synchronous velocity mode is set with the Type (6040h: Bit 13, Bit 12). The operation
modes are listed in the table.
Bit 13
Bit 12
Operation mode
Description
0
0
Continuous operation
(position control)
Performs continuous operation at the Target velocity (60FFh).
Since operation is performed while the position deviation is
monitored, an alarm of Overload or Excessive position deviation is
generated when a load exceeding the motor torque is applied.
If the position deviation suddenly occurs, for example, when a
large load is removed, the motor accelerates suddenly or puts into
a state of overspeed to remove the deviation.
0
1
Continuous operation
(speed control)
Performs continuous operation at the Target velocity (60FFh).
When a load exceeding the motor torque is applied, an alarm of
Overload is generated.
Содержание aSTEP AZ mini Driver
Страница 14: ...14 1 Introduction...
Страница 128: ...128 3 EtherCAT communication...
Страница 146: ...146 4 Object list...
Страница 164: ...164 5 Troubleshooting...
Страница 170: ...170 6 Reference materials...
Страница 171: ...171 6 Reference materials...







































































