





























Drive profile
52
3 E
therC
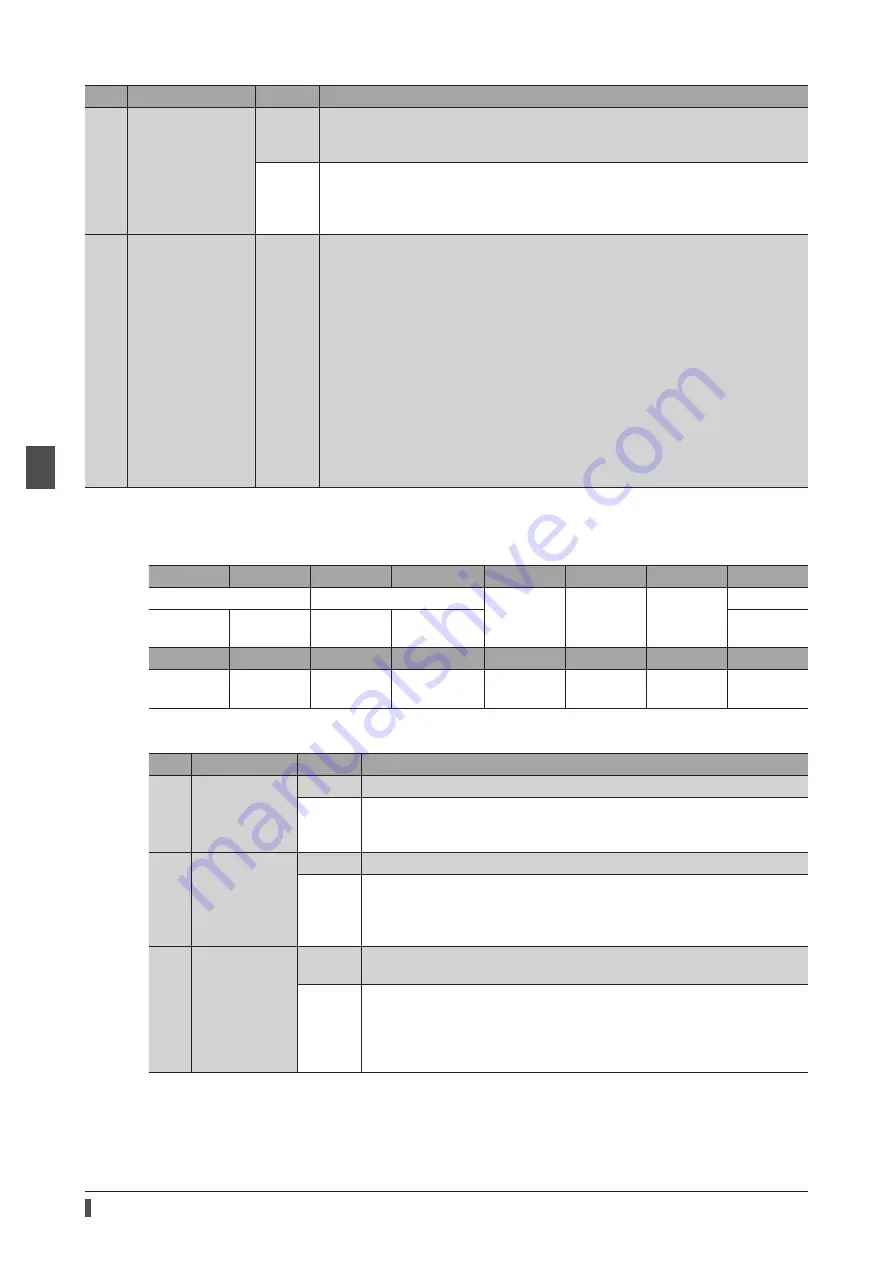
Bit
Name
Value
Description
5
Change set
immediately
0
When the New set point (6040h: Bit 4) is set from 0 to 1 during
operation, the new operation command is stored. When the present operation is
completed, the stored new operation command is started.
1
When the New set point (6040h: Bit 4) is set from 0 to 1 during operation, the new
operation command is immediately applied.
During push-motion operation, when the New set point (6040h: Bit 4) is set from 0 to
1 to start new operation, set the Change set immediately to 1.
4
New set point
0 to 1
Start of positioning operation
Before starting operation, select the Wrap (6040h: Bit 14), Push (6040h: Bit 13), Base
position of Rel (6040h: Bit 12), and Abs/Rel (6040h: Bit 6).
When positioning operation is started in a state where the operation is stopped by
setting the Halt (6040h: Bit 8) to 1, set the Halt (6040h: Bit 8) from 1 to 0 first and
leave an interval at more than double of the communication cycle before setting the
New set point (6040h: Bit 4) from 0 to 1. The operation may not be started unless the
interval at more than double of the communication cycle is left.
The command cannot be received in the following state, and the operation is not
started.
•
The Halt (6040h: Bit 8) has been set to 1.
•
The STOP input is being ON.
•
The drive state machine is other than "Operation enabled."
•
The motor is in a non-excitation state.
For Bit 7 and Bit 3 to Bit 0, refer to “State transition of drive state machine” on p.46.
Statusword of Profile position mode
Bit 15
Bit 14
Bit 13
Bit 12
Bit 11
Bit 10
Bit 9
Bit 8
Manufacturer specific
Operation mode specific
Internal
limit active
Target
reached
Remote
ms
TLC
−
Following
error
Set point
acknowledge
−
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Warning
Switch on
disabled
Quick stop
Voltage
enabled
Fault
Operation
enabled
Switched
on
Ready to
switch on
Details of Statusword
Bit
Name
Value
Description
15
TLC
0
A load does not reach the upper limit of the motor output torque.
1
A load reached the upper limit of the motor output torque.
When push-motion operation is performed, use this signal as the completion
signal of push-motion operation.
13
Following error
0
The position deviation error does not occur.
1
The position deviation error occurs.
The position deviation exceeded the value set in the Following error window
(6065h). The value changes to 0 if an alarm of Excessive position deviation
(alarm code 10h) or an alarm of Overload (alarm code 30h) is reset.
12
Set point
acknowledge
0
The operation start by the New set point (6040h: Bit 4) has not been
received.
1
The operation start by the New set point (6040h: Bit 4) was received.
When the New set point (6040h: Bit 4) is set to 1 to receive the operation
start, the Set point acknowledge changes to 1.
When the New set point (6040h: Bit 4) is set to 0, the Set point acknowledge
also changes to 0.
Содержание aSTEP AZ mini Driver
Страница 14: ...14 1 Introduction...
Страница 128: ...128 3 EtherCAT communication...
Страница 146: ...146 4 Object list...
Страница 164: ...164 5 Troubleshooting...
Страница 170: ...170 6 Reference materials...
Страница 171: ...171 6 Reference materials...







































































