





























Functions
91
3 E
therC
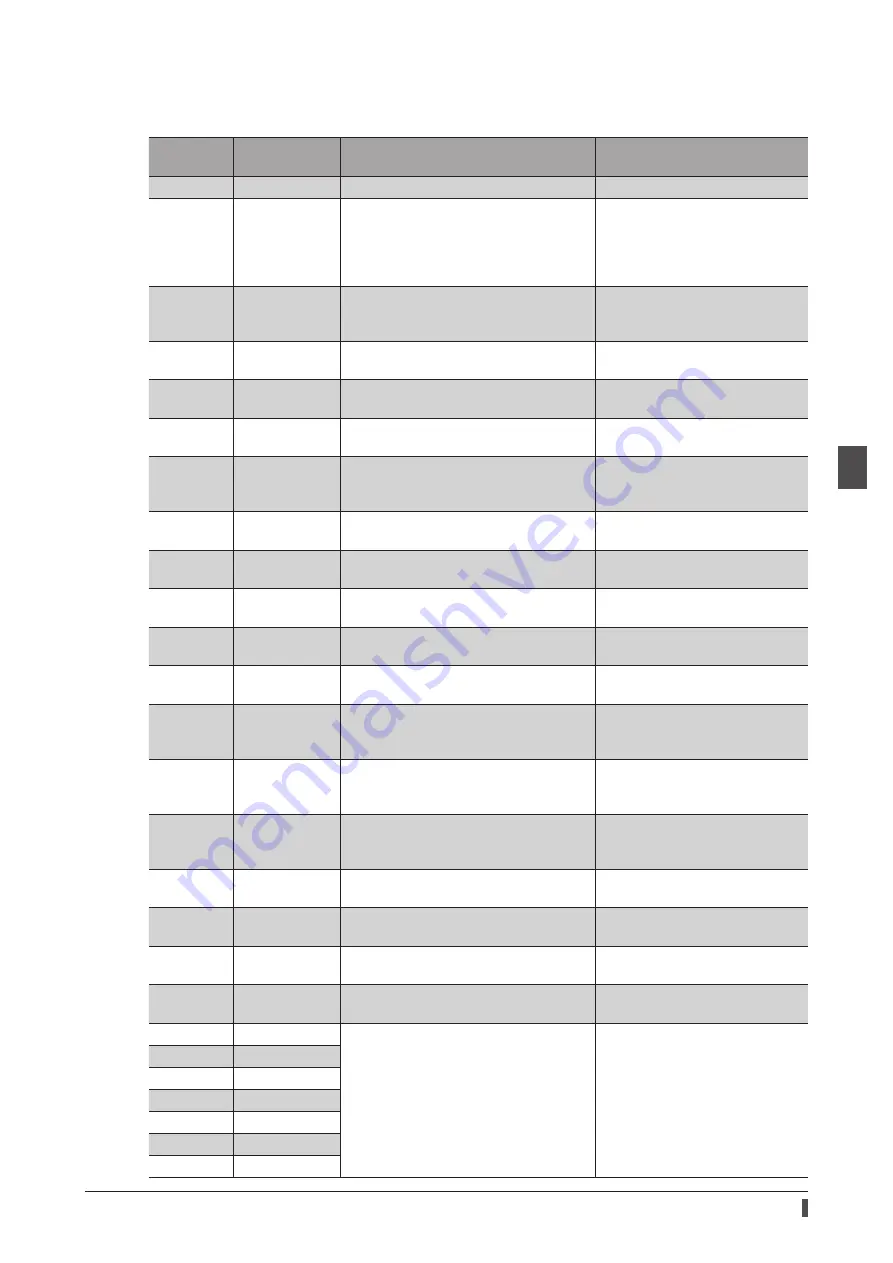
Input signals list
To assign signals via EtherCAT communication, use the "Assignment number” in the table instead of the signal names.
Assignment
number
Signal name
Function
Signal state
0
Not used
Set when the input terminal is not used.
−
1
FREE
Shut off the motor current to put the motor
into a non-excitation state. When an
electromagnetic brake motor is used, the
electromagnetic brake is in a state of
releasing the motor shaft.
0: No motion
1: Electromagnetic brake is in a
state of rel motor non-
excitation
3
CLR
Clear the deviation (position deviation)
between the command position and the
actual position to zero.
0: No motion
1: Clear deviation
5
STOP
Stop the motor.
0: No motion
1: Stop operation
8
ALM-RST
Reset the alarm generated presently.
0: No motion
1: Reset alarm
9
P-PRESET
Rewrite the mechanical home to the
present position.
0: No motion
1: Execute preset
13
LAT-CLR
Clear the cumulative load. This is used
when the Cumulative load value auto clear
(41B3h) is set to “0: Disable.”
0: No motion
1: Clear cumulative load
14
INFO-CLR
Clear the information status.
0: No motion
1: Clear information status
16
HMI
Release the function limitation of the
MEXE02
.
0: Function limitation
1: Release the function limitation
18
CCM
Change the control mode from the normal
mode to the current control mode.
0: Normal mode
1: Current control mode
21
T-MODE
Disable the overload alarm.
0: No motion
1: Disable the overload alarm
22
CRNT-LMT
Execute the current limit.
0: Release the current limitation
1: Current limit
23
SPD-LMT
Execute the speed limit. This signal cannot
be used in the Cyclic synchronous position
mode (CSP).
0: Release the speed limit
1: Speed limit
26
FW-BLK
Stop the operation in the forward direction.
0: No motion
1: Stop the forward direction
operation
27
RV-BLK
Stop the operation in the reverse direction.
0: No motion
1: Stop the reverse direction
operation
28
FW-LS
This is a signal to be input from the limit
sensor in the forward direction.
0: OFF
1: ON
29
RV-LS
This is a signal to be input from the limit
sensor in the reverse direction.
0: OFF
1: ON
30
HOMES
This is a signal input from the mechanical
home sensor.
0: OFF
1: ON
31
SLIT
This is a signal to be input from the slit
sensor.
0: OFF
1: ON
80
R0
These are general signals.
0: OFF
1: ON
81
R1
82
R2
83
R3
84
R4
85
R5
86
R6
Содержание aSTEP AZ mini Driver
Страница 14: ...14 1 Introduction...
Страница 128: ...128 3 EtherCAT communication...
Страница 146: ...146 4 Object list...
Страница 164: ...164 5 Troubleshooting...
Страница 170: ...170 6 Reference materials...
Страница 171: ...171 6 Reference materials...







































































