





























Drive profile
54
3 E
therC
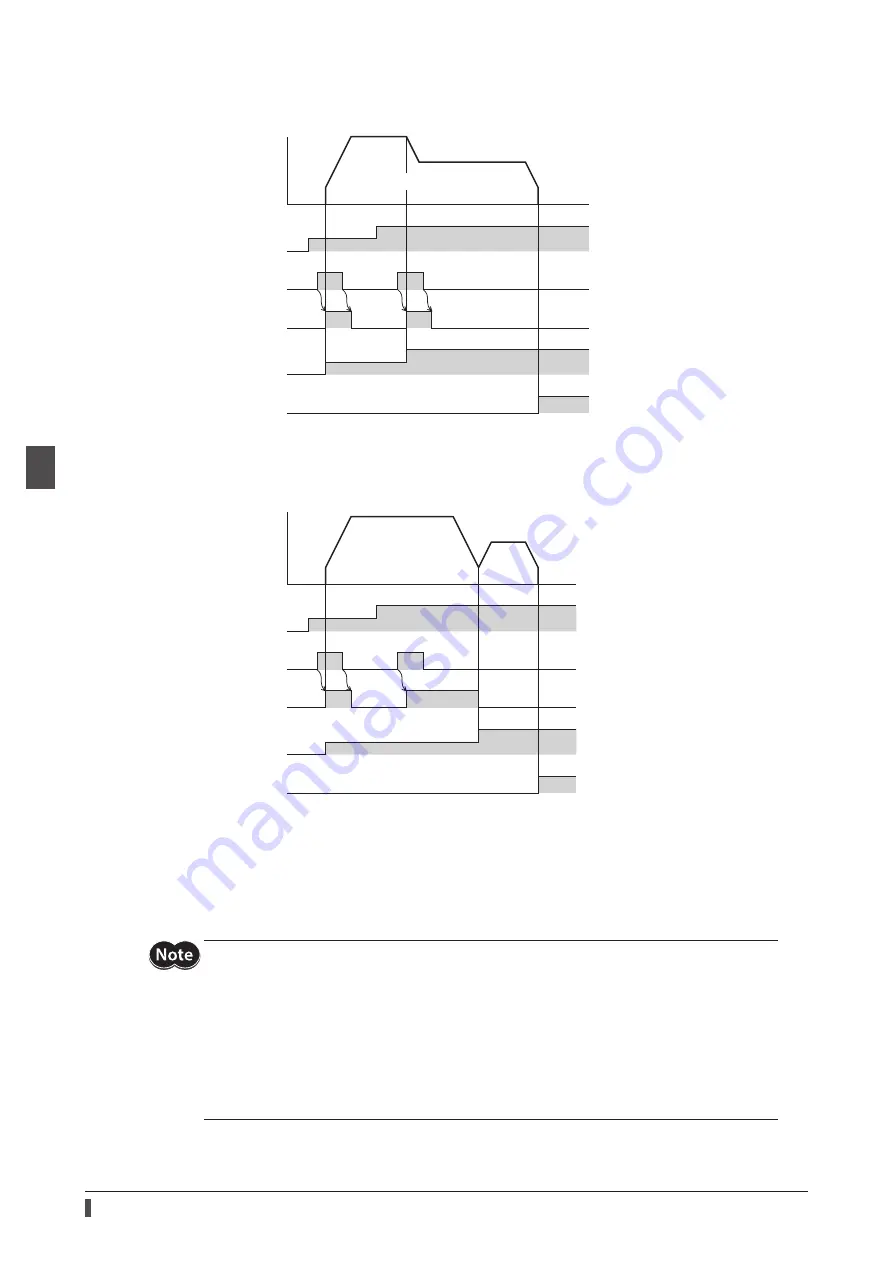
Single set-point [When the Change set immediately (6040h: Bit 5) is 1]
If the New set point (6040h: Bit 4) is newly set during operation, the new operation command is applied immediately.
Velocity
Target position
(607Ah)
Effective target position
New set point
(6040h: Bit 4)
Set point acknowledge
(6041h: Bit 12)
Target reached
(6041h: Bit 10)
Reference speed
Set of set-points [When the Change set immediately (6040h: Bit 5) is 0]
When the New set point (6040h: Bit 4) is newly set during operation, the new operation command is stored. When the
present operation is completed, the stored new operation command is started.
Velocity
Target position
(607Ah)
New set point
(6040h: Bit 4)
Set point acknowledge
(6041h: Bit 12)
Effective target position
Target reached
(6041h: Bit 10)
Reference speed
z
Push-motion positioning operation
After the Push (6040h: Bit 13) is set to 1, when the New set point (6040h: Bit 4) is set to 1, push-motion positioning
operation is started. When push-motion positioning operation is started, self-start operation (rectangular operation)
is performed at the operating speed set in the Profile velocity (6081h).
During operation, when the New set point (6040h: Bit 4) is set from 0 to 1 to start new operation, set the Change set
immediately to1.
•
When a mechanism installed to the motor pressed against a load, push-motion operation is
performed while the position deviation of 2.7° generates. Since an alarm of Overload may be
generated if the operation is stopped in this state, perform operation to return the actual position
by 3.6° before push-motion operation is stopped.
•
Do not perform push-motion operation with geared motors and the
DGII
Series. Doing so may
cause damage to the motor or gear part.
•
When push-motion operation is stopped in a state where a load is pressed, set the Operating
current (4120h) of the next operation to be executed, to a value in the Push current (4121h) or less.
If a higher current value than the Push current (4121h) is set, the push current may increase when
the operation transitions, causing an unexpected push force to apply.
Содержание aSTEP AZ mini Driver
Страница 14: ...14 1 Introduction...
Страница 128: ...128 3 EtherCAT communication...
Страница 146: ...146 4 Object list...
Страница 164: ...164 5 Troubleshooting...
Страница 170: ...170 6 Reference materials...
Страница 171: ...171 6 Reference materials...







































































